第 13 周:四足机器人入门 + 期末项目实施
🎬 开场:从央视春晚说起
2025 年除夕夜,全国 7 亿观众盯着电视。 16 台宇树 H1 人形机器人 穿着花棉袄,跟新疆舞蹈演员一起表演陕北秧歌《秧 BOT》。 整齐的转身、抛手绢、扭腰胯—— 这不是 CG,是真实的机器人在跳舞。
中国第一次在央视舞台上展示了这个能力。第二天,宇树科技的股价飞涨,订单接到手软。 你正在用的这门课,就是带你走进这个新世界的入场券。
🎥 现场视频
🎭 2025 央视春晚《秧 BOT》 · 16 台宇树 H1 跳陕北秧歌
🇨🇳 国内访问: B 站搜索"宇树春晚" ·
🌍 海外访问: YouTube 搜索
💡 思考题(开场 3 分钟):
看完视频,你觉得这些机器人是怎么做到「16 台同步跳舞」的?
- 它们是预先编程好动作的?还是实时控制的?
- 万一摔倒了会怎么样?
- 如果你来当导演,你会让它们做什么动作?
🌟 这节课你将学到
20 年前(2005 年)波士顿动力 BigDog 被踹不倒的视频震惊世界。 20 年后(2025 年)宇树春晚机器人让全国看到中国制造的实力。 这之间发生了什么? 让我们一起回顾这个领域的 60 年演进。
并且,最重要的:你的笔记本就能让一只机器狗在屏幕上跑起来。
13.1 四足机器人 — 为什么人类痴迷于让机器人长腿?
🚗 轮子 vs 🦵 腿:谁更厉害?
人类发明轮子已经 5500 年了。一个轮子能以 200km/h 飞奔,那为啥还要造长腿的机器人?
答案藏在地形里:
🏙️ 平整地面 🪜 楼梯 ⛰️ 山地、瓦砾
┌──────────┐ ┌──────────┐ ┌──────────┐
轮子 │ ✅ │ │ ❌ │ │ ❌ │
│ 200km/h │ │ 卡住 │ │ 翻车 │
└──────────┘ └──────────┘ └──────────┘
腿 ┌──────────┐ ┌──────────┐ ┌──────────┐
│ 🐢 │ │ ✅ │ │ ✅ │
│ 慢但稳 │ │ 一步一阶 │ │ 抬腿越过 │
└──────────┘ └──────────┘ └──────────┘
地球表面 70% 的地方人和动物能去,但轮子去不了。所以救灾、巡检、月球探索、火灾搜救……这些场景,腿才是王。
🐕 为什么是 4 条腿?
| 腿数 | 优势 | 劣势 | 代表 |
|---|---|---|---|
| 2 条腿 🚶 | 灵活、可空出手做事 | 平衡极难,控制最复杂 | Atlas、Optimus、宇树 H1 |
| 4 条腿 🐕 | 平衡相对简单,越障强 | 不会"用手" | Spot、Unitree Go2、ANYmal |
| 6 条腿 🐜 | 极其稳定,可以失去 1-2 条腿继续走 | 体积大、能耗高 | RHex、HEX |
💡 4 条腿是工程上的「甜点」:稳定性、灵活性、成本的最佳平衡。 大自然让狗、马、猫主宰陆地,是有道理的。
🌍 四足机器人在现实中的应用
🏭 工业巡检:壳牌石化、国家电网用 Spot 替代人去高危区域
🚨 灾难救援:日本福岛核电站派四足进辐射区
🎖️ 军事侦察:DARPA 资助波士顿动力 20+ 年
📦 物流运输:Spot Enterprise 在亚马逊仓库巡逻
🎬 影视拍摄:《银翼杀手 2049》《黑镜》中的机器狗都是真机器人
🏥 医疗陪护:ANYmal 在医院送药、量血压
🏠 家庭服务:未来的"机器狗"宠物(已经在路上)
13.2 四足机器人结构剖析
🦴 让我们打开一只机器狗看看
俯视图(从上往下看):
┌──── 机身 Body ────┐
│ [大脑+电池] │
│ │
LF ──┤ ├── RF
🦵 │ │ 🦵
│ │
│ │
LH ──┤ ├── RH
🦵 │ │ 🦵
└───────────────────┘
LF = Left Front (前左)
RF = Right Front (前右)
LH = Left Hind (后左)
RH = Right Hind (后右)
🦵 每条腿的内部解剖
机身
│
├─── 髋关节 Hip ──→ 让腿左右摆动(外展/内收)
│ [电机 1]
│
┌──┴──┐
│ │ ←── 大腿 Thigh
│ │
│ ├─── 大腿关节 ──→ 让大腿前后摆动
│ │ [电机 2]
│ │
│ ┌──┴──┐
│ │ │ ←── 小腿 Calf
│ │ │
│ │ ├─── 小腿关节 ──→ 让小腿弯曲
│ │ │ [电机 3]
│ │ │
│ │ ● ← 足端(接触地面)
关键数字:
- 每条腿 3 个关节 → 3 个电机
- 4 条腿 × 3 关节 = 12 个自由度(DoF)
- 控制频率:500-1000 Hz(远超人类反应速度)
- 关键传感器:IMU(姿态)+ 关节编码器 + 足底接触
💰 商业产品价格对比
| 品牌 | 型号 | 价格 | 谁用得起? |
|---|---|---|---|
| Boston Dynamics | Spot | $75,000+ | 大公司、政府 |
| Boston Dynamics | Atlas | 不卖 | 神秘 |
| Unitree | Go2 EDU | ¥10,000 | 大学生也买得起! |
| Unitree | B2 | ¥150,000 | 工业巡检 |
| Unitree | H1(人形) | ¥600,000 | 研究院 |
| XGO | XGO-Mini | ¥3,500 | 桌面玩具 / 儿童编程 |
| DEEP Robotics 云深处 | X20 | ¥80,000 | 工业 |
🎯 2020 年至今,四足机器人价格下降了 95%。 这就是为什么现在每个机器人课程都要讲它。
13.3 步态控制 60 年演进史 🎬
这是这门课最值得一听的故事。看完之后,你会明白为什么今天的机器狗能跑能跳。
📜 第一幕:1960s-1980s 「机械玩具时代」
关键词:纯机械、固定步态、走不快也走不远
最早的"步行机器人"其实是机械玩具。1968 年,General Electric 造了一个 1.4 吨的 4 足载人机器人 Walking Truck,让人坐进去用操纵杆控制 4 条腿。它走得像在散步——每条腿都靠操作员手动控制液压油泵。
1968 年的 GE Walking Truck:
┌──────┐
│ 人 │ ← 操作员
│ 🧑 │ 左右手脚同时控制 4 条腿
│ │ 需要"4 维操作"
└─┬──┬─┘
│ │
🦵 🦵
💡 结论:人脑根本同时控制不了 4 条腿。必须自动化!
🧬 第二幕:1980s-1990s 「中央模式发生器(CPG)时代」
关键词:模仿生物神经,自激振荡
生物学家发现:狗走路时大脑根本没在算步态!背部脊髓里有一组神经元在自激振荡,就像 4 个连着的钟摆,自动产生 4 条腿的协调节奏。
这就是 CPG(Central Pattern Generator,中央模式发生器)。
CPG 工作原理(极简版):
┌──> 神经元 LF ──> 控制前左腿
│ ↕
[振荡器] 耦合 ┌──> 控制前右腿
│ ↕ ──> 神经元 RF
│ ↕
│ 耦合
│ ↕
└──> 神经元 RH ──> 控制后右腿
↕
神经元 LH ──> 控制后左腿
特点:
✓ 4 个振荡器互相耦合,自动产生协调步态
✓ 不需要"想",纯节奏
✗ 不能应对突发情况(如踩到香蕉皮)
代表机器人:MIT 的 TROT(1988)、Honda 的早期实验。
⚖️ 第三幕:1990s-2000s 「ZMP 时代」
关键词:零力矩点,数学保证不倒
CPG 走平地还行,一上坡就跌跤。日本人发明了 ZMP(Zero Moment Point,零力矩点) 控制理论。
核心思想:机器人不会摔倒的充分条件是——「地面反作用力的合力作用点(ZMP)始终在足底支撑多边形内」。
什么是 ZMP?想象你站着不动:
🧑 你的身体
│
├─── 重心 (G)
│
▼
ZMP 必须落在脚底范围内 ←── 这样才不会倒
┌─────┐
│ ● │ ← 这一点就是 ZMP
└─────┘ ← 脚底支撑多边形
四足机器人也一样:
●LF ●RF
\ /
\ /
ZMP 必须在这个四边形内
/ \
/ \
●LH ●RH
📚 这个理论让 Honda 造出了 ASIMO(2000 年),人形机器人首次走出实验室。 四足领域的代表是日本筑波大学的 TITAN 系列、Sony 的 AIBO(1999 年的家用机器狗,全球卖了 25 万只)。
缺点:ZMP 要求机器人"小心翼翼地走",速度慢、动态性差。无法跑起来。
🏃 第四幕:2005-2015 「BigDog 革命 — MPC + 全身控制(WBC)时代」
关键词:踹不倒、能跑能跳、模型预测控制
2005 年,Boston Dynamics 发布震撼世界的 BigDog 视频:工程师在冰面上狠狠踹了机器狗一脚,BigDog 跌跌撞撞调整了几步,没倒。
这背后是 Model Predictive Control(MPC,模型预测控制) + Whole-Body Control(WBC,全身控制) 的胜利。
MPC 思想(简化版):
现在状态 ──┐
│
▼
┌─────────┐
│ 模型预测 │ 在脑子里模拟未来 0.5 秒会发生什么
│ "如果我 │ 尝试 100 种不同的"如果……"
│ 这样动" │ 选最稳的那个
└────┬────┘
│
▼
发出关节指令
│
▼
0.01 秒后,重新预测
│
▼
……(每秒做 100-1000 次)
典型代表:
- 🐶 Boston Dynamics BigDog(2005)、LS3(2012)
- 🐎 MIT Cheetah 1/2/3(2013-2017)— 跑出 6.4 m/s,能跳过 18 cm 障碍物
- 🇨🇭 ETH ANYmal(2016)— 商业化版本,电站巡检
💡 这个时代的核心人物:Marc Raibert(波士顿动力创始人),他 1986 年的博士论文奠定了腿足机器人控制的数学基础。 课后强烈推荐看:Marc Raibert 的 TED 演讲
🧠 第五幕:2018-2022 「深度强化学习(DRL)时代」
关键词:神经网络、Sim-to-Real、不需要写控制器了
2019 年 1 月,ETH 苏黎世发表了一篇论文 Learning Agile and Dynamic Motor Skills for Legged Robots(《让腿足机器人学习敏捷动作》),震撼了整个领域。
关键洞察:与其手写一个复杂的 MPC 控制器(要十几个工程师写好几年),不如让神经网络自己学!
强化学习 = 让机器人在仿真里摔几百万次
🤖 试一下
↓
摔倒了 ❌ → 扣分(reward -1)
↓
重置 → 换种走法
↓
走得更远了 ✅ → 加分(reward +10)
↓
重复 1 亿次……
↓
🎓 神经网络自动学会怎么走
在 GPU 仿真里:1 小时 = 10 年实际训练时间
关键技术突破:
- 大规模并行仿真:NVIDIA Isaac Gym 同时跑 4096 个机器人在练习
- Domain Randomization:随机化仿真参数(摩擦、质量、传感器噪声),让仿真策略能直接搬到真机
- Teacher-Student 蒸馏:先用全状态信息训练老师,再让学生只用真实传感器复现
仿真 → 真机的"反差萌":
仿真世界 真实世界
┌──────────┐ ┌──────────┐
│ 完美物理 │ │ 电机有延迟│
│ 无噪声 │ ≠ ❌ │ 地面打滑 │
│ 精确数据 │ │ IMU 抖动 │
└──────────┘ └──────────┘
↓
传统办法:让神经网络在仿真训练 → 真机直接挂掉
↓
现代办法:Domain Randomization
在仿真中:
摩擦系数随机:0.3 ~ 1.5
电机延迟随机:5ms ~ 30ms
IMU 噪声随机
→ 训练出"百毒不侵"的神经网络
→ 直接搬到真机也能跑!🎉
代表作品:
- 🐕 ETH ANYmal-C 在山地越野(2020)
- 🤖 OpenAI 用 RL 让 ANYmal 学会跳跃(2021)
- 🐕 Unitree A1 / Go1 —— 全部用 RL 训练的步态
- 🏃 Cassie(双足)首次完成 5 km 跑步(2022)
🌌 第六幕:2023 至今 「具身智能与端到端」
关键词:大模型、自然语言、视觉-动作端到端
2023 年开始,机器人控制进入「具身智能(Embodied AI)」时代:
- Google RT-2(2023):把视觉语言大模型直接当机器人大脑,用户说"把可乐递给我"它就去拿
- Figure 01 + OpenAI(2024):人形机器人能听懂自然语言对话
- Unitree H1 + 大模型(2024):跳舞、做家务全靠 VLA(Vision-Language-Action)模型
- Physical Intelligence π0(2024):基础模型时代,一个模型控制所有机器人
具身智能时代的"控制栈":
📷 摄像头 🎙️ 语音
\ /
\ /
┌───▼──────────▼───┐
│ VLA 大模型 │ ← 端到端神经网络
│ (Vision- │ 一个模型搞定看、听、动
│ Language- │
│ Action) │
└────────┬────────┘
│
关节角度(12 DoF)
│
▼
🤖 四足机器人
不再需要手写:步态生成、IK、控制器
神经网络全包了!
🤯 2026 年的现状:当年波士顿动力工程师写 6 个月才能调出来的步态,今天 ETH 的学生在 NVIDIA Isaac Lab 里训练 8 小时就能复现。
🎬 海外同行的最新作品
🤸 Boston Dynamics Atlas · 跑酷与体操(2024)· YouTube 原链接
🤝 Figure 01 + OpenAI · 大模型驱动的人形机器人对话与做家务 · YouTube 原链接
📺 国内访问 YouTube 困难? 这些视频在 B 站都有官方/搬运版本: 搜 Boston Dynamics Atlas · 搜 Figure 01
📊 演进时间轴一图流
1968 1990s 2005 2019 2023→
│ │ │ │ │
│ │ │ │ │
▼ ▼ ▼ ▼ ▼
机械液压 ZMP 控制 MPC + WBC 深度强化学习 具身智能/大模型
GE Walking AIBO/ASIMO BigDog/Spot ANYmal/Go1 RT-2/π0
🐢 慢吞吞 🐩 小心翼翼 🏃 能踹不倒 💪 越野自如 🧠 听话能想
需要 4 个人开 1 台 日本人定义稳定性 美军砸钱研究 AI 时代来临 一个模型管所有
13.4 让我们看懂机器狗怎么"走路" — 步态详解
🤖 PyBullet 仿真实拍:三种步态对比
⬇️ 下面是用 PyBullet 物理仿真生成的真实步态动画(Laikago/Unitree 早期型号)。 同样的代码框架,期末项目 P10 你可以亲手让它跑起来。
左:Walk(缓慢稳)· 中:Trot(小跑)· 右:Bound(兔跳)· 用 PyBullet 仿真渲染
单独看 Trot 步态
🏃 Trot:对角腿同时抬起 / 同时落下(最常见的日常步态)
慢速 Walk vs 兔跳 Bound
Walk:慢速、稳定、三足支撑
🚶 Walk:4 拍轮流,通常有 3 条腿保持着地,速度慢但稳定性最好。
Bound:高速、跳跃、前后腿成组
🐰 Bound:前腿成组、后腿成组,适合高速跳跃式前进。
👀 观察提示:
- 注意 LF(左前)和 RH(右后)是同时抬起的
- RF(右前)和 LH(左后)是另一对"搭档"
- 整个机身因为对角对称,所以几乎不会左右晃
🎼 5 种步态的"节拍图"
下面这张图清晰地展示了 5 种步态中 4 条腿什么时候在地上、什么时候在空中:
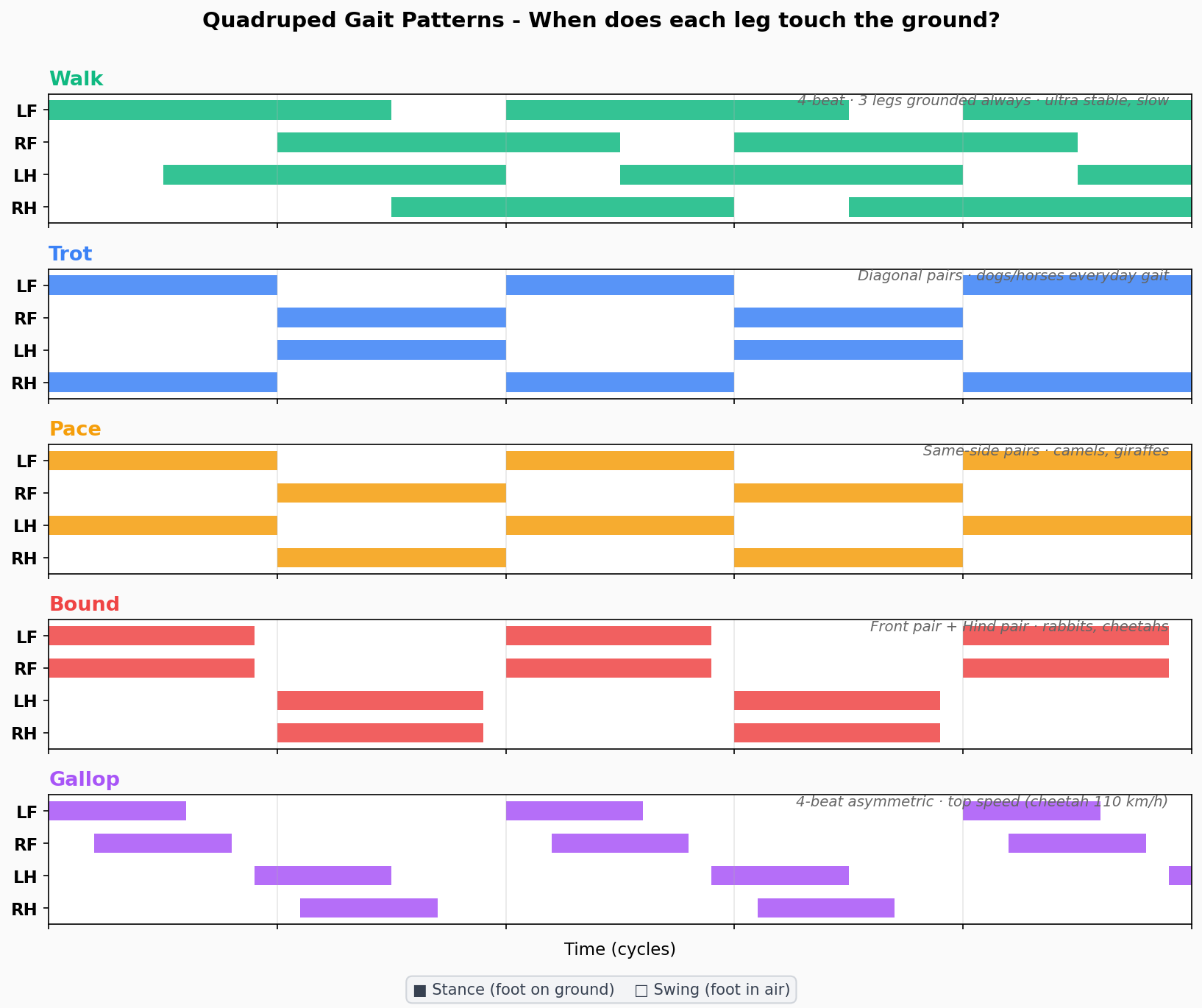
横轴是时间(周期数),每行是一条腿。色块 = 着地相 (stance),空白 = 摆动相 (swing)
重点观察:
- 🟢 Walk 每个时刻都有 3 条腿着地 → 像乌龟一样稳,但慢
- 🔵 Trot 对角腿(LF↔RH、RF↔LH)同步 → 狗的日常步态
- 🟠 Pace 同侧腿(LF↔LH、RF↔RH)同步 → 骆驼特征
- 🔴 Bound 前腿对、后腿对各自同步 → 兔子跳
- 🟣 Gallop 4 条腿轮流,节奏不对称 → 猎豹冲刺时的姿态
🔍 不同步态的速度-能耗对比
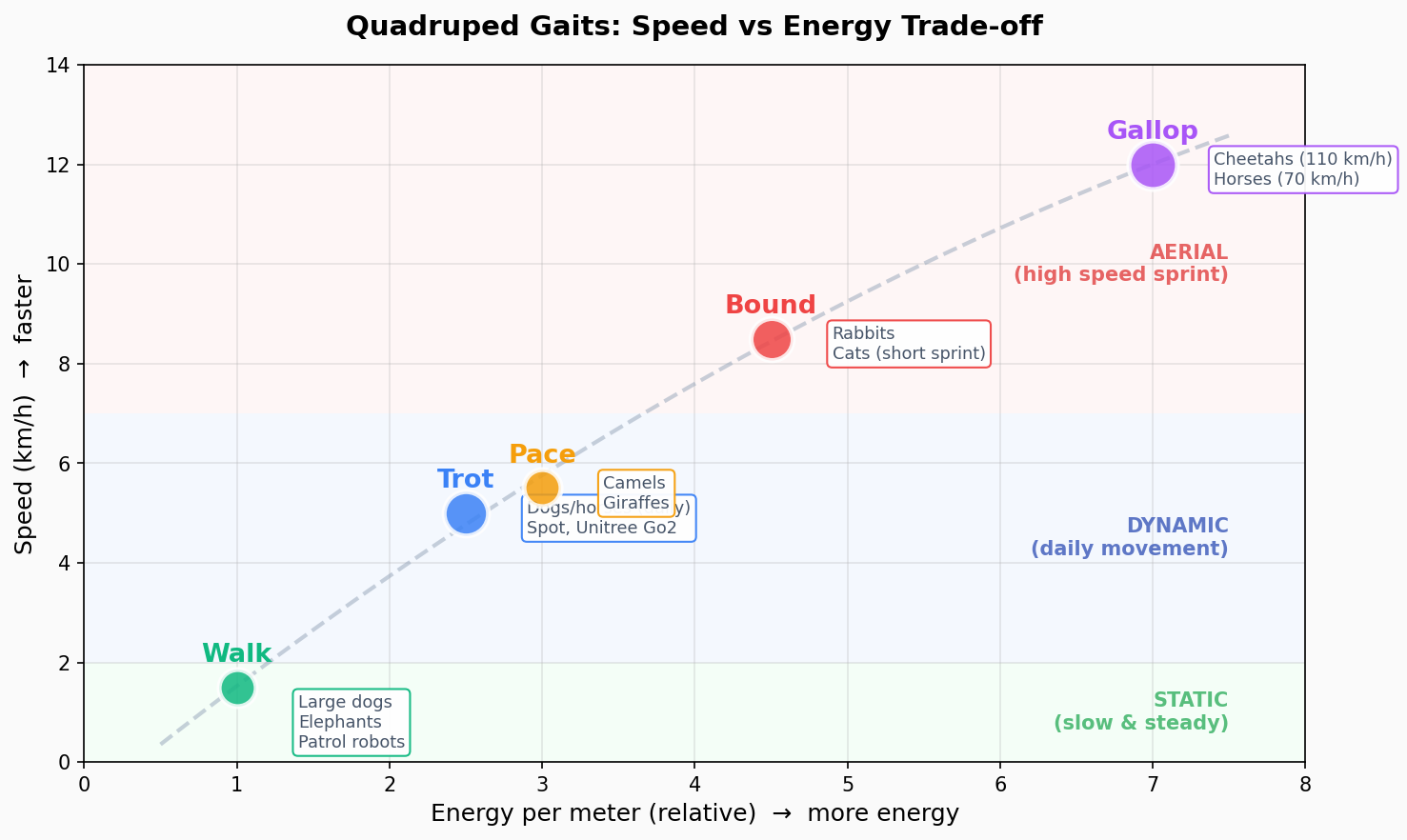
每种步态在「能耗 vs 速度」上的位置,以及代表动物
自然给我们的启发:
| 速度区间 | 推荐步态 | 真实例子 |
|---|---|---|
| 🐢 0-2 km/h | Walk | 大象散步、扫地机器人巡逻、Spot 工业巡检 |
| 🐕 2-7 km/h | Trot | 狗的日常、Unitree Go2 默认步态 |
| 🐰 7-10 km/h | Bound | 兔子逃跑、家猫追玩具 |
| 🐆 10+ km/h | Gallop | 猎豹冲刺 110 km/h、赛马 |
💡 思考题:你想让快递机器人在校园里送水,应该用哪种步态?为什么?
提示:要考虑稳定性、续航、地形适应。
13.5 PyBullet仿真入门
PyBullet是轻量级物理仿真引擎,适合学习
13.5.1 安装与基本使用
# 安装PyBullet
pip install pybullet numpy
# 验证
python3 -c "import pybullet as p; print('PyBullet已安装')"
13.5.2 基础仿真示例
import pybullet as p
import pybullet_data
import time
# 连接物理引擎(GUI模式)
physicsClient = p.connect(p.GUI)
# 设置搜索路径(用于加载默认模型)
p.setAdditionalSearchPath(pybullet_data.getDataPath())
# 设置重力
p.setGravity(0, 0, -9.8)
# 加载地面
planeId = p.loadURDF("plane.urdf")
# 加载一个立方体
startPos = [0, 0, 1]
startOrientation = p.getQuaternionFromEuler([0, 0, 0])
boxId = p.loadURDF("cube.urdf", startPos, startOrientation)
# 仿真循环
for i in range(1000):
p.stepSimulation()
time.sleep(1./240.) # 240Hz仿真频率
# 断开连接
p.disconnect()
13.5.3 加载四足机器人模型
import pybullet as p
import pybullet_data
import time
import numpy as np
# 连接
p.connect(p.GUI)
p.setAdditionalSearchPath(pybullet_data.getDataPath())
p.setGravity(0, 0, -9.8)
# 加载地面
planeId = p.loadURDF("plane.urdf")
# 加载四足机器人(使用示例模型)
# 注意:这里使用的是PyBullet自带的Laikago模型
robotId = p.loadURDF("laikago/laikago_toes.urdf", [0, 0, 0.5])
# 获取机器人信息
numJoints = p.getNumJoints(robotId)
print(f"关节数量: {numJoints}")
# 打印关节信息
for i in range(numJoints):
info = p.getJointInfo(robotId, i)
print(f"关节{i}: {info[1].decode('utf-8')}, 类型: {info[2]}")
# 简单仿真
for _ in range(2000):
p.stepSimulation()
time.sleep(1./240.)
p.disconnect()
13.6 简单步态控制
13.6.1 正弦波步态生成
最简单的步态:用正弦函数控制关节
import pybullet as p
import pybullet_data
import time
import numpy as np
# 初始化
p.connect(p.GUI)
p.setAdditionalSearchPath(pybullet_data.getDataPath())
p.setGravity(0, 0, -9.8)
p.loadURDF("plane.urdf")
# 加载机器人
robotId = p.loadURDF("laikago/laikago_toes.urdf", [0, 0, 0.5])
# 定义关节ID(根据模型不同可能需要调整)
# 假设每条腿3个关节:hip, thigh, calf
leg_joints = {
'LF': [0, 1, 2], # 前左腿
'RF': [3, 4, 5], # 前右腿
'LH': [6, 7, 8], # 后左腿
'RH': [9, 10, 11] # 后右腿
}
def simple_gait(t, leg_name, frequency=1.0):
"""
生成简单的正弦波步态
t: 时间
leg_name: 'LF', 'RF', 'LH', 'RH'
"""
# 不同腿的相位差(实现Trot步态)
phase_offset = {
'LF': 0,
'RH': 0, # 与LF同相位(对角线)
'RF': np.pi, # 相位差180度
'LH': np.pi # 与RF同相位(对角线)
}
phase = phase_offset[leg_name]
# 关节角度(简化版)
hip_angle = 0 # 髋关节保持中立
thigh_angle = 0.3 * np.sin(2 * np.pi * frequency * t + phase)
calf_angle = -0.6 * np.sin(2 * np.pi * frequency * t + phase)
return [hip_angle, thigh_angle, calf_angle]
# 仿真循环
t = 0
dt = 1./240.
for _ in range(5000):
# 为每条腿生成目标角度
for leg_name, joint_ids in leg_joints.items():
target_angles = simple_gait(t, leg_name, frequency=0.5)
# 设置关节目标位置(位置控制)
for joint_id, target_angle in zip(joint_ids, target_angles):
p.setJointMotorControl2(
robotId,
joint_id,
p.POSITION_CONTROL,
targetPosition=target_angle,
force=20 # 最大力矩
)
p.stepSimulation()
time.sleep(dt)
t += dt
p.disconnect()
13.6.2 Trot步态实现
import pybullet as p
import pybullet_data
import time
import numpy as np
import math
class QuadrupedController:
"""简单的四足控制器"""
def __init__(self, robot_id):
self.robot_id = robot_id
# 关节ID(需要根据实际模型调整)
self.leg_joints = {
'LF': [0, 1, 2],
'RF': [3, 4, 5],
'LH': [6, 7, 8],
'RH': [9, 10, 11]
}
# 步态参数
self.stance_height = 0.3 # 站立高度
self.step_height = 0.05 # 抬腿高度
self.step_length = 0.1 # 步长
def trot_gait(self, t, leg_name, frequency=1.0):
"""
Trot步态生成
"""
# 相位(对角腿同相)
if leg_name in ['LF', 'RH']:
phase = 0
else: # RF, LH
phase = np.pi
# 步态周期位置
cycle_phase = (2 * np.pi * frequency * t + phase) % (2 * np.pi)
# 摆动相 vs 支撑相
if cycle_phase < np.pi: # 摆动相(腿抬起)
progress = cycle_phase / np.pi
x = self.step_length * (progress - 0.5)
z = self.step_height * np.sin(np.pi * progress)
else: # 支撑相(腿着地)
progress = (cycle_phase - np.pi) / np.pi
x = self.step_length * (0.5 - progress)
z = 0
# 逆运动学(简化版)
y = 0 # 横向位置
hip = 0
# 大腿和小腿角度(简化计算)
l_thigh = 0.2 # 大腿长度
l_calf = 0.2 # 小腿长度
target_height = self.stance_height + z
# 简化逆运动学
thigh = np.arctan2(x, target_height)
calf = -2 * thigh
return [hip, thigh, calf]
def step(self, t, frequency=1.0):
"""执行一步控制"""
for leg_name, joint_ids in self.leg_joints.items():
target_angles = self.trot_gait(t, leg_name, frequency)
for joint_id, angle in zip(joint_ids, target_angles):
p.setJointMotorControl2(
self.robot_id,
joint_id,
p.POSITION_CONTROL,
targetPosition=angle,
force=20
)
# 主程序
def main():
# 初始化
p.connect(p.GUI)
p.setAdditionalSearchPath(pybullet_data.getDataPath())
p.setGravity(0, 0, -9.8)
p.loadURDF("plane.urdf")
# 加载机器人
start_orientation = p.getQuaternionFromEuler([math.pi / 2, 0, math.pi / 2]) # Keeps the robot facing forward
robotId = p.loadURDF("laikago/laikago_toes.urdf", [0, 0, 0.5],start_orientation)
# 创建控制器
controller = QuadrupedController(robotId)
# 仿真
t = 0
dt = 1./240.
print("开始仿真,按Ctrl+C停止...")
try:
while True:
controller.step(t, frequency=0.5)
p.stepSimulation()
time.sleep(dt)
t += dt
except KeyboardInterrupt:
print("仿真结束")
p.disconnect()
if __name__ == '__main__':
main()
13.7 进阶话题(了解即可)
13.7.1 控制方法对比
| 方法 | 原理 | 优点 | 缺点 | 代表 |
|---|---|---|---|---|
| 模型预测控制(MPC) | 基于动力学模型优化 | 精确、可解释 | 需要准确模型 | MIT Cheetah |
| 强化学习(RL) | 神经网络端到端学习 | 自适应、鲁棒 | 训练时间长 | ANYmal |
| 轨迹优化 | 离线优化轨迹 | 高效、可预测 | 难以适应变化 | 研究用 |
| CPG(中央模式发生器) | 生物启发振荡器 | 简单、实时 | 适应性差 | 早期机器人 |
13.7.2 从仿真到实物(Sim-to-Real)
Sim2Real的挑战:
仿真环境 实物环境
┌──────────┐ ┌──────────┐
│ 完美模型 │ │ 模型误差 │
│ 无噪声 │ ≠ │ 传感噪声 │
│ 精确控制 │ │ 延迟抖动 │
└──────────┘ └──────────┘
解决方法:
1. Domain Randomization(领域随机化)
→ 仿真中随机化参数(质量、摩擦力等)
2. 系统辨识(System Identification)
→ 测量实物参数,更新仿真模型
3. 教师-学生网络
→ 仿真中训练教师,实物上部署学生
13.7.3 前沿研究方向
- 可微仿真:使用可微分物理引擎,梯度优化控制策略
- 视觉导航:结合视觉感知的自主导航
- 操作任务:带机械臂的四足机器人
- 人形机器人:四足技术向双足迁移
13.7.4 🎯 课堂作业:用 AI 辅助编程让机器狗小跑前进
📦 起点代码:
examples/quadruped_walk_starter.py✅ 参考实现:
examples/quadruped_walk_reference.py⏱️ 课堂时长:60–90 分钟(在教室电脑上即可完成,无需 GPU、无需训练)
🧭 任务说明
我把一段"看起来很合理"的机器狗 trot 步态代码(quadruped_walk_starter.py)发给大家。你只要拷贝下来直接运行:
pip install pybullet numpy
python3 quadruped_walk_starter.py
你会看到机器狗启动后瞬间扑街。本次作业就是:
用 AI 辅助编程工具(Cursor / Copilot / ChatGPT / Claude / Gemini ...), 把这段代码改成机器狗能在地面上稳定向前小跑的版本。
不允许直接抄参考实现,但是允许(鼓励)你"边运行边和 AI 对话,根据机器狗实际表现给出反馈"。
🎓 为什么这是个好的 AI 辅助编程练习?
机器狗仿真同时混合了三类知识,任何一类单独看都不算难,但叠在一起就会让 AI 给出大量"看着合理但跑不通"的方案——这正是真实工程中 AI 辅助编程最常见的场景:
┌──────────────────────────────────────────────────────────┐
│ │
│ 设计空间 ──┐ │
│ ・步态选什么(trot / creep / pace / bound) │
│ ・频率、步长、抬腿高度 │
│ ・摆动相 vs 支撑相的相位安排 │
│ │
│ ├──→ AI 给你一段代码 │
│ 物理知识 ──┘ 运行 → 摔倒 / 走错方向 / 软脚 │
│ ・刚体动力学、重心、支撑多边形 │
│ ・PID 整定(force / positionGain) │
│ ・摩擦力、惯量、URDF 关节顺序 │
│ │
│ 仿真坑 ──→ observe(看视频)→ describe(描述现象) │
│ ・启动 PID 爆炸 │
│ ・坐标系被 Euler 角颠倒 │
│ ・关节索引硬编码错位 │
│ │
└──────────────────────────────────────────────────────────┘
💡 AI 辅助编程的核心能力,不是"会写提示词",而是"会把你眼睛看到的物理现象用准确的语言告诉 AI"——这就是这次作业要训练的能力。
🐶 起点代码的 4 个坑(先不告诉学生)
| # | 隐藏问题 | 表面现象 |
|---|---|---|
| 1 | 启动瞬间所有关节从 0 度被 PID 拉到目标角度,相当于一次脉冲冲击 | 机器狗一启动就被弹飞 |
| 2 | 关节 id 0~11 硬编码,但 Laikago URDF 里夹杂了 fixed 关节和脚趾 |
半数电机指令打到了错误的部件上 |
| 3 | force=20 远不够撑住 24 kg 的 Laikago |
即使站住,膝盖会瞬间软掉 |
| 4 | 慢速 trot 意味着任何瞬间只有两条对角腿撑地,动力学上不稳定 | 站住也走不动,走两步就倒 |
| 5 | start_orientation 里的 π/2 旋转交换了机身坐标轴 |
即使代码"按教科书"前进,机器狗实际是在倒着走 |
让学生通过和 AI 反复对话,逐个发现并修复这些问题。
📝 一次真实的 AI 辅助调试过程(教学案例)
下面是教师本人在准备这节课时与 Gemini 的完整对话过程。重点不是结论,而是每次"机器狗具体怎么坏"的描述:
| 轮次 | 学生(你)说什么 | AI 给出的方向 | 结果 |
|---|---|---|---|
| 1 | "让这只机器狗走慢一点" | 降低 frequency 和 step_length | 还是摔 |
| 2 | "look, 机器狗刚启动就 face-plant 了"(贴图) | 改 start_orientation + 给 thigh/calf 加偏置 | 学生坚持:"orientation 不能改,是环境要求" |
| 3 | "保留这个 orientation 不能动" | 切换到关节空间正弦轨迹,绕开坐标问题 | 不工作 |
| 4 | "It cannot stand for 2s" | 诊断是 PID explosion + creep gait + warmup | 站住了 2 秒,但走两步就倒 |
| 5 | "好了一点,能站 2s 走一下然后倒" | 动态扫描关节、提高 force 到 150 | 站稳了,但走不远 |
| 6 | "yes, it stands but doesn't walk forward, it walks back" | 翻转 thigh 摆动方向的正负号 | ✅ 终于向前走 |
| 7 | "can this walk a little faster?" | frequency 0.4→1.0、step_length 0.08→0.16 | ✅ 速度提升 |
关键观察:每一次"前进"的关键,都不是 AI 给出更聪明的算法,而是你给 AI 提供了一个新的物理观察。例如:
- 第 2 轮:贴出"扑街"的截图 → AI 才知道是初始朝向问题
- 第 4 轮:"2 秒就倒"这个时间窗口 → AI 才能定位 PID 启动冲击
- 第 6 轮:"向前走"和"向后走"的区别 → AI 才能定位坐标轴翻转
🧠 第一性原理:AI 看不到你的屏幕,它只能根据你给的语言重建一个"想象中的世界"。 你给的物理观察越具体、越能区分"哪些假设可以被证伪",AI 就越能命中真正的 bug。
🛠️ 你需要做的事
步骤 1:把起点代码拷到你自己的作业仓库
# 在你的 ai-robot-XXX 作业仓库里
mkdir -p week13_walk
curl -O https://raw.githubusercontent.com/ai-robot-class/ai-robot-class.github.io/main/examples/quadruped_walk_starter.py
mv quadruped_walk_starter.py week13_walk/
cd week13_walk
pip install pybullet numpy
python3 quadruped_walk_starter.py # 先看一下机器狗怎么扑街
步骤 2:与 AI 对话,逐步迭代
推荐使用 Cursor(IDE 里直接对话)或 Claude/ChatGPT/Gemini(浏览器)。流程建议:
1. 运行代码 → 观察机器狗行为(站住?摔倒?走哪个方向?)
2. 用自然语言描述给 AI 听,越具体越好
✅ 好:"机器狗启动 0.5 秒内就 face-plant 了,身体往前栽"
❌ 差:"代码不工作,帮我修一下"
3. 把 AI 给的修改贴回代码,重新跑
4. 重复 1-3 直到机器狗稳定前进
💡 小技巧:
- 录一段 5–10 秒的屏幕录像 / GIF 截图给 AI(多模态模型可以看图)
- 每一轮把 AI 的修改"逐条解释"给它听,让 AI 解释为什么这么改
- 如果连续 3 轮没进展,主动换一个方向(例如"我觉得不是 IK 的问题,让我们试试 creep gait")
步骤 3:评估你的最终结果
把你最终调通的代码保存为 quadruped_walk.py,运行:
python3 quadruped_walk.py
合格标准(任选其一即可,越多分越高):
| 等级 | 标准 |
|---|---|
| 🥉 D 级(60 分) | 机器狗能站住 ≥ 5 秒不倒 |
| 🥈 C 级(75 分) | 机器狗能向某个方向前进 ≥ 1 m |
| 🥇 B 级(85 分) | 机器狗能稳定前进 ≥ 3 m 且 20 秒不倒 |
| 🏆 A 级(95 分+) | 在 B 级基础上,能走直线(横向漂移 < 1 m)或速度可调 |
步骤 4:提交三样东西
在你的作业仓库 week13_walk/ 目录下提交:
week13_walk/
├── quadruped_walk.py # 最终调通的代码
├── ai_chat_log.md # 与 AI 的完整对话记录(截图 or 文本,>= 5 轮)
└── reflection.md # 反思(>= 300 字)
反思(reflection.md)必答 3 个问题
- 你向 AI 提供的哪一个具体的物理观察让它命中了一个 bug?请贴出来。
- AI 给你的方案里,有没有出现"看着合理但跑不通"的情况?为什么?
- 如果不用 AI,纯靠你自己读 PyBullet 文档 + 调试,你估计需要多久?
🆘 实在搞不定怎么办?
不要直接看参考代码,先按下面的 hint 顺序尝试。每个 hint 都对应一个真实的坑:
💡 Hint 1:「机器狗一启动就被弹飞」
仔细看 PyBullet 文档:`p.loadURDF` 之后所有关节默认是 0 度,但你的代码立刻要求它们到达 `0.7` / `-1.4`。这相当于一次脉冲冲击。 关键词:`p.resetJointState`、`init_pose`、warmup phase。💡 Hint 2:「关节角度发到错了部位」
打印一下 `p.getNumJoints(robot_id)` 看看 Laikago 实际有多少关节?再用 `p.getJointInfo(robot_id, i)[2]` 看每个关节的类型(`p.JOINT_REVOLUTE` / `p.JOINT_FIXED`)。 关键词:动态扫描 revolute joints、自动分腿。💡 Hint 3:「站住了 2 秒就倒」
慢速 trot 步态有 50% 时间是"两条对角腿撑地",这在动力学上是不稳定的,需要靠惯性维持。 关键词:creep gait(爬行步态)、4 拍循环、单腿轮换、25% 摆动 / 75% 支撑。💡 Hint 4:「走错方向 / 转圈圈」
`start_orientation = p.getQuaternionFromEuler([math.pi/2, 0, math.pi/2])` 把机身的局部坐标轴和世界坐标轴打乱了。 关键词:翻转步态里 thigh 摆动的正负号,或用 `getBasePositionAndOrientation` 实测前进方向。💡 Hint 5:「想跑快一点」
调整 `frequency`(步态周期)和 `step_length`(步长),但**两者要一起涨**——光涨频率不涨步长会变成原地踏步。同时 `force` 和 `positionGain` 也要相应提高。如果用完所有 hint 还不行,再去看 examples/quadruped_walk_reference.py。但请在 reflection.md 里写明你看了参考代码的哪些部分、为什么自己没想到。
🎬 课堂演示流程(教师参考)
| 时间 | 内容 |
|---|---|
| 0–5 min | 演示 quadruped_walk_starter.py,让全班看机器狗扑街 |
| 5–15 min | 师生共同分析"为什么会扑街",列出可能的原因(设计空间 + 物理) |
| 15–60 min | 学生 2 人一组,独立用 AI 工具迭代 |
| 60–80 min | 选 3 组上台演示自己的版本 + 复盘对话过程 |
| 80–90 min | 教师演示参考实现,对照 5 个坑做技术复盘 |
🎯 课堂教学目标不是让所有人都把机器狗调通——能调通的同学享受成就感,没调通的同学通过对照参考代码反思自己的提示词哪里不够具体,两种收获都很重要。
13.7.5 🚀 选修挑战:用强化学习(PPO + Residual)训练机器狗爬楼梯
⚠️ 本节为选修。需要 GPU 或耐心(CPU 训练 6+ 小时),上课时间不要求所有学生完成。 完整代码:
week13/quadruped_ppo_residual_stairs.py本节采用 PPO + residual controller。它不是让神经网络从零发明走路,而是先给机器人一个稳定的 trot 基础步态(就是 §13.7.4 你和 AI 一起调出来的那种),再让 PPO 学习每个关节的小幅修正。
💡 这一节展示了 §13.7.4 之后的下一个阶梯:当手写步态遇到楼梯、跳跃等复杂场景就力不从心了,必须让算法自己学。
本节代码使用(仅供选修)
如果你想尝试本节,按下面顺序把 week13 强化学习仓库加入你的作业:
# 1. fork https://github.com/ai-robot-class/week13 到你自己账号
# 2. 在你自己的作业仓库根目录:
git submodule add https://github.com/<your-github-name>/week13.git week13
mkdir -p reports results
git add .gitmodules week13 reports results
git commit -m "Add week13 RL submodule (optional)"
git push
以后换电脑时初始化 submodule:
git submodule update --init --recursive
为什么用 Residual Controller?
四足机器人爬楼梯不是简单的“往前跑”。如果奖励函数写得不严格,机器人很容易学会投机动作:
- 身体翻倒,但腿抬得比台阶高
- 冲到最后一级附近后摔下去
- 用机身或小腿卡在台阶上,而不是脚掌站稳
所以本课把任务拆成两层:
基础步态生成器(trot)
↓
给出 12 个关节的 nominal target
↓
PPO 神经网络
↓
输出 12 维 residual correction
↓
最终关节目标 = 基础步态 + 小幅修正
这样做有三个好处:
| 项目 | 直接端到端 RL | PPO + residual controller |
|---|---|---|
| 初始探索 | 大量摔倒 | 从可走步态附近开始 |
| 学习目标 | 同时学走路和爬楼 | 主要学抬脚、落脚、稳住身体 |
| 课堂可解释性 | 黑盒较强 | 能清楚看到“基础控制 + 学习修正” |
| 训练稳定性 | 较难 | 更适合教学和 CPU 仿真 |
严格成功定义
本任务中,“成功”不是身体高度超过台阶,也不是腿翘到台阶上方。必须同时满足:
- 机身中心到达最后一级台阶区域
- 机身保持直立,
body_up_z > 0.88 - 至少两只脚趾
toe link真实接触最后一级台阶 - 身体、大腿、小腿不能把机器人撑在台阶上
- 速度和角速度足够小
- 连续稳定保持约
0.45s
这比“看起来爬上去”严格得多,也更接近真实机器人任务。
程序文件目录
week13/ # Git submodule: https://github.com/ai-robot-class/week13
├── quadruped_ppo_residual_stairs.py # PPO + residual controller 主程序
├── run_quadruped_skill_curriculum.py # 长时间课程学习训练脚本
├── quadruped_training_debug_notes.md # 本次训练调试记录
├── ppo_run_flat.zip # 已训练好的平地跑步模型
├── ppo_residual_stairs.zip # 已训练好的低台阶模型(三阶进步片段来自它)
├── quadruped_rl_stairs.py # 早期 CMA-ES 爬楼梯基线
└── quadruped_rl_slope.py # 斜坡步态示例
images/week13/
├── quadruped_stairs_three_steps_progress.gif
├── quadruped_training_reward_curve.png
└── quadruped_progress_*.gif # 训练过程精选动图
content/
└── week13.md # 本讲义
主程序内部结构:
quadruped_ppo_residual_stairs.py
├── build_stairs() # 创建楼梯环境
├── gait_targets() # 基础 trot 步态生成器
├── ResidualStairsEnv # Gymnasium 环境封装
│ ├── observation_space # 姿态、速度、关节、接触、相位
│ ├── action_space # 12 维 residual action
│ ├── _reward_done() # 奖励与严格成功判定
│ └── render() # 录制演示视频
├── train() # stable-baselines3 PPO 训练
└── demo() # 加载模型并演示
关键代码思想
1. 基础步态 + residual action
base = gait_targets(self.t, leg, self.gait)
targets = base + residual[idx : idx + 3]
PPO 输出的是小幅修正,而不是完整关节角:
ACTION_SCALE = np.array([0.10, 0.18, 0.22] * 4)
residual = action * ACTION_SCALE
2. 观测空间
策略网络可以看到:
- 机身位置、高度、速度、角速度
- 机身朝上方向
body_up_z - gait phase 的
sin/cos - 12 个关节角与关节速度
- 4 个脚趾是否接触地面
- 上一帧 action
- 距离最后一级台阶还差多少
3. 成功判定:必须脚踩最终台阶
stable_on_top = (
STAIR_TOP_X - SUCCESS_X_MARGIN <= pos[0] <= STAIR_TOP_X + 0.08
and climb >= STAIR_TOP_HEIGHT - SUCCESS_HEIGHT_TOL
and body_up_z > 0.88
and toe_contacts >= 2
and not bad_body_contact
and speed < 0.55
and spin < 1.2
)
本地运行
安装依赖:
pip install pybullet numpy gymnasium stable-baselines3 torch opencv-python
如果只想看训练成果,不需要重新训练,直接加载我们已经训练好的模型即可。
方法 A:直接使用训练成果
演示平地跑步模型:
python3 week13/quadruped_ppo_residual_stairs.py demo \
--task run \
--model week13/ppo_run_flat.zip \
--steps 500 \
--gui
录制平地跑步视频:
python3 week13/quadruped_ppo_residual_stairs.py demo \
--task run \
--model week13/ppo_run_flat.zip \
--steps 500 \
--record week13/student_run_demo.mp4
演示低台阶模型:
python3 week13/quadruped_ppo_residual_stairs.py demo \
--task stairs \
--model week13/ppo_residual_stairs.zip \
--stair_steps 4 \
--step_height 0.03 \
--init_x 0.00 \
--steps 500 \
--gui
录制低台阶视频:
python3 week13/quadruped_ppo_residual_stairs.py demo \
--task stairs \
--model week13/ppo_residual_stairs.zip \
--stair_steps 4 \
--step_height 0.03 \
--init_x 0.00 \
--steps 500 \
--record week13/student_stairs_demo.mp4
week13/ppo_residual_stairs.zip不是“完美爬完楼梯”的模型,而是本次训练中能明显爬上约三阶低台阶的代表模型。它适合作为课堂讨论材料:为什么已经有进步,但还没达到严格成功?
方法 B:学生自己从头训练
推荐先按技能分阶段训练,不要直接训练楼梯。
第一步:平地稳定跑步
python3 week13/quadruped_ppo_residual_stairs.py train \
--task run \
--timesteps 300000 \
--num_envs 8 \
--batch_size 2048 \
--curriculum \
--model week13/student_run_flat.zip
第二步:加载跑步模型,训练低平台跳跃
python3 week13/quadruped_ppo_residual_stairs.py train \
--task jump \
--load_model week13/student_run_flat.zip \
--timesteps 400000 \
--num_envs 8 \
--batch_size 2048 \
--curriculum \
--model week13/student_jump_low.zip
第三步:加载跳跃模型,训练低台阶
python3 week13/quadruped_ppo_residual_stairs.py train \
--task stairs \
--load_model week13/student_jump_low.zip \
--timesteps 500000 \
--num_envs 8 \
--batch_size 2048 \
--curriculum \
--model week13/student_stairs_low.zip
这里推荐默认打开 --curriculum。程序会先训练平地跑步,再训练低平台跳跃,最后训练“离台阶很近的低台阶”,并逐步把机器人起点往后拉、增加台阶数量。直接从远距离 5cm 完整楼梯开始训练太难,容易陷入“刚接近第一阶就摔倒”的局部最优。
方法 C:从我们的模型继续训练
如果学生想在已有成果上继续改进,可以从 ppo_residual_stairs.zip 接着训练:
python3 week13/quadruped_ppo_residual_stairs.py train \
--task stairs \
--load_model week13/ppo_residual_stairs.zip \
--timesteps 300000 \
--num_envs 8 \
--batch_size 2048 \
--curriculum \
--model week13/student_stairs_continue.zip
训练后录制新模型:
python3 week13/quadruped_ppo_residual_stairs.py demo \
--task stairs \
--model week13/student_stairs_continue.zip \
--stair_steps 4 \
--step_height 0.03 \
--init_x 0.00 \
--steps 500 \
--record week13/student_stairs_continue.mp4
方法 D:长时间自动调试
如果要连续调试 10 小时并自动整理视频,可以运行:
python3 week13/run_quadruped_skill_curriculum.py \
--hours 10 \
--num_envs 8
该脚本会循环执行 run -> jump -> stairs,每个阶段保存模型、录制 demo 视频、解析 episode 结果,并把当前最重要的视频整理到 week13/rl_runs/<时间戳>/important_videos/。
学生提交作业时,建议至少提交三样东西:
- 训练或继续训练后的模型
.zip - 一段 demo 视频
.mp4 - 简短记录:奖励函数改了什么、失败模式是什么、是否比原模型更稳定
训练时间预期
| 配置 | 建议参数 | 预期 |
|---|---|---|
| 快速冒烟测试 | --task run --timesteps 50000 --num_envs 2 --curriculum |
检查程序能跑 |
| 课堂演示 | run 300k -> jump 400k -> stairs 500k |
能看到分阶段学习过程 |
| 较认真训练 | week13/run_quadruped_skill_curriculum.py --hours 10 |
自动循环调试并整理视频 |
| 工业级训练 | Isaac Lab / MuJoCo MJX 上千并行环境 | 才能高成功率、强鲁棒 |
注意:PyBullet 是 CPU 物理仿真,不能像 Isaac Gym 那样一次跑几千只机器狗。PPO 能力更强,但训练时间也会更长。
本次连续训练记录
本次实测从“平地跑步 -> 低平台跳跃 -> 低台阶上楼”连续训练约 7 小时 22 分钟 后手动停止。训练输出保存在:
week13/rl_runs/20260520_015053_10h/
训练完成了 12 轮完整循环,并开始第 13 轮平地跑步。重要视频已自动整理到:
week13/rl_runs/20260520_015053_10h/important_videos/
PPO + residual controller 连续训练后的楼梯片段:机器人已经能明显向前爬上约三阶低台阶,但还没有达到“最终台阶稳定站住”的严格成功标准。
训练过程中,demo 评估指标整体呈现出明显的阶段性提升。尤其是平地跑步从第 1 轮的 0.89 提升到第 12 轮的 13.57;楼梯阶段虽然没有达到最终稳定成功,但第 10 轮的爬升高度已经接近三阶低台阶。
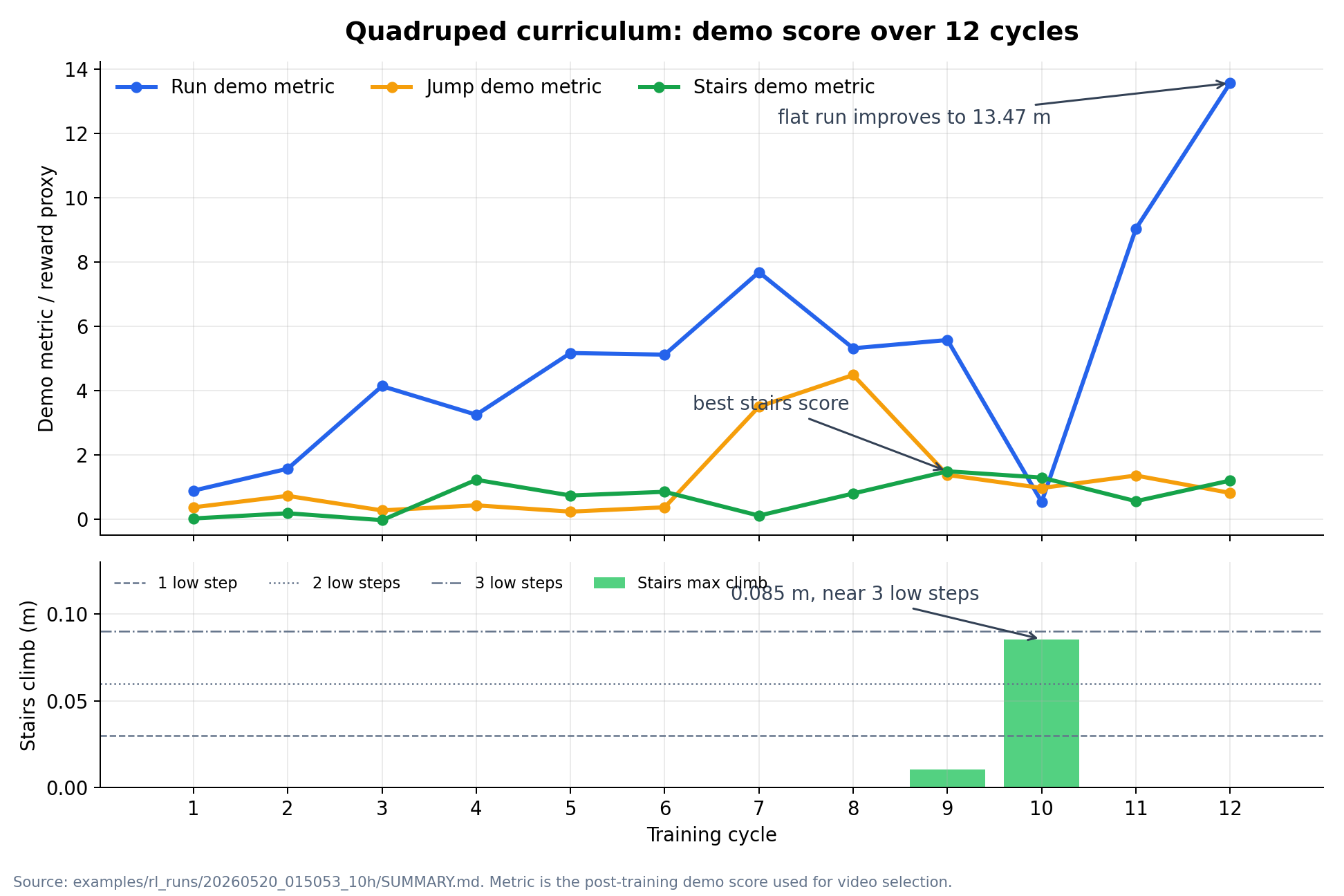
训练 12 轮后的评估曲线:上图是每轮 demo 的 reward proxy / metric,下图是楼梯阶段最大爬升高度。虚线分别表示一阶、二阶、三阶低台阶高度。
下面五个片段展示了这次训练从失败到进步的过程:
| 阶段 | 最有代表性的视频 | 实测结果 | 结论 |
|---|---|---|---|
| 平地跑步 | important_videos/best_run_12.mp4 |
前进约 13.47 m,body_up_z = 0.974,但 episode 末尾仍判定为摔倒 |
平地向前运动能力明显进步,但还不是稳定完整跑步 |
| 低平台跳跃 | important_videos/best_jump_08.mp4 |
前进约 4.49 m,爬升 0.0 m,最终摔倒 |
没有学会有效跳跃,更多是在向前冲 |
| 低台阶上楼 | videos/10_stairs.mp4 / 上方 GIF |
最大爬升约 0.085 m,约等于三阶低台阶高度,姿态仍不够稳定 |
已经能明显爬上约三阶,是很大的进步;但还没有在最终台阶稳定站住 |
第 10 轮 stairs demo 是这次训练中最值得保留的进步片段。按当前低台阶高度 0.03 m 计算,0.085 m 的最大爬升已经接近三阶高度;从视频上看,机器人不再只是原地翻倒或抬腿,而是能借助向前运动爬上连续台阶。不过,严格成功标准仍然要求机器人到达最终台阶区域后保持直立、脚趾稳定接触台阶并停住,因此它还不能算“完整完成楼梯任务”。
这次训练的主要经验是:
- 区分“明显进步”和“严格成功”:能爬上约三阶低台阶是重要进步;但严格成功必须同时满足身体在最终台阶附近、身体保持直立、至少两个脚趾稳定接触最终台阶、没有翻倒或身体撞台阶。
- 先会跑,再谈跳,再谈上楼:直接训练楼梯会让策略学到“向前扑、抬腿、翻倒”的投机行为,而不是稳定运动。
- 奖励必须区分前进和稳定前进:只奖励
x方向距离会鼓励机器人低姿态冲出去,因此需要同时约束body_up_z、横向漂移、角速度、身体高度和脚接触。 - 当前 residual controller 仍偏弱:基础 gait 本身不够稳定时,PPO 只学习小幅 residual 很难补出完整跑步、跳跃和上楼能力。
- 视频审查比数值指标更可靠:本次多次出现指标看似进步,但视频中实际是翻倒、滑行或抬脚误判,因此训练脚本必须保存 demo 视频作为判断依据。
后续如果继续改进,建议先把目标缩小为:平地跑步 episode 全程不摔倒;然后训练单次低平台跳跃;最后再进入多级台阶。必要时可以引入更强的基础控制器,例如手写站立控制、足端轨迹跟踪、模仿学习,或者切换到 Isaac Lab / MuJoCo MJX 进行更大规模并行训练。
扩展挑战
- 课程学习:调整
--curriculum的阶段,让初始距离、台阶高度、台阶数量、摩擦力逐步变难 - 奖励改进:加入能耗惩罚、身体平稳奖励、脚滑惩罚
- 观测增强:加入台阶高度图或前方深度相机
- 鲁棒性训练:随机摩擦力、机器人质量、关节延迟
- 迁移到 GPU 仿真:用 Isaac Lab 或 MuJoCo MJX 做大规模并行训练
13.8 工业级仿真平台 — MATRiX(课堂演示 / 选修)
让大家看看产业界、研究院在用的高保真仿真平台是什么样的
13.8.1 MATRiX 是什么
MATRiX 是中山智能机器人研究院(ZSIBOT)开源的四足机器人仿真平台:
MATRiX = MuJoCo(物理)+ Unreal Engine 5(渲染)+ CARLA(场景)
┌─────────────────────────────────────────────────────────────┐
│ │
│ 物理仿真层 → MuJoCo(高精度、关节动力学) │
│ ↓ │
│ 通信中间件 → ROS2 Humble(话题、服务) │
│ ↓ │
│ 视觉渲染层 → Unreal Engine 5(光线追踪、超写实) │
│ ↓ │
│ 场景库 → CARLA(自动驾驶场景、城市/野外) │
│ │
└─────────────────────────────────────────────────────────────┘
13.8.2 与 PyBullet 的对比
| 维度 | PyBullet(本课作业) | MATRiX(演示) |
|---|---|---|
| 物理引擎 | Bullet(简单) | MuJoCo(精确) |
| 渲染质量 | 简单 OpenGL | UE5 光追、超写实 |
| 场景库 | 几何 URDF | CARLA 城市/野外 |
| 传感器仿真 | 基础相机 | 相机/LiDAR/IMU 全栈 |
| 硬件需求 | ❌ 无独显也行 | ✅ NVIDIA RTX 4060+ |
| 适用场景 | 教学、原型 | 产业级开发、Sim2Real |
13.8.3 硬件要求(必读)
⚠️ 完整 MATRiX 必须有独立 NVIDIA 显卡才能运行
| 项目 | 最低要求 | 推荐 |
|---|---|---|
| 操作系统 | Ubuntu 22.04 | Ubuntu 22.04 |
| GPU | NVIDIA RTX 4060 | RTX 4070 及以上 |
| 显存 | 8 GB | 12 GB+ |
| 驱动 | NVIDIA Driver ≥ 535 | 最新版 |
| ROS | ROS2 Humble | ROS2 Humble |
| 编译器 | GCC C++11+ | GCC 11+ |
📝 没有独显的同学:本课不强制要求安装 MATRiX。课堂上看演示即可,作业用 PyBullet 完成。
13.8.4 Docker 快速部署(仅供有显卡同学)
# 1. 安装 NVIDIA Container Toolkit(让 Docker 能用 GPU)
distribution=$(. /etc/os-release;echo $ID$VERSION_ID)
curl -s -L https://nvidia.github.io/libnvidia-container/gpgkey | sudo apt-key add -
curl -s -L https://nvidia.github.io/libnvidia-container/$distribution/libnvidia-container.list \
| sudo tee /etc/apt/sources.list.d/nvidia-container-toolkit.list
sudo apt update && sudo apt install -y nvidia-container-toolkit
sudo systemctl restart docker
# 2. 拉取 MATRiX 代码并构建(需要联网下载 ~10GB 资源包)
git clone https://github.com/ZSIBOT/MATRIX.git
cd MATRIX
bash scripts/install_deps.sh
# 3. 下载发布资源(基础包 + 运行时 + 地图)
bash scripts/release_manager/install_chunks.sh 0.1.2
# 4. 验证环境
bash scripts/check_env.sh runtime
# 5. 启动仿真
./bin/sim_launcher
💡 网络问题:如果 ROS apt 源不可达,使用
ROSAPTREPOURL=<镜像>环境变量。 如果 aria2/wget 报 TLS 错误,加SKIPARIA2=1跳过加速。
13.8.5 课堂演示流程(建议 8-10 分钟)
👨🏫 教师指南:在带独显的笔记本上提前安装好 MATRiX,课堂现场演示
演示脚本
[0:00 - 0:30] 介绍 MATRiX 的定位
"我们前面学的 PyBullet 是教学版仿真,
现在给大家看一下产业界、研究院用的工业级仿真平台 —— MATRiX"
[0:30 - 2:00] 启动 sim_launcher,展示界面
- 演示机器人选择(Unitree Go1 / Go2 / 自定义)
- 演示地图选择(城市 / 工地 / 野外 / 室内)
- 强调:这是 UE5 实时渲染,光线追踪
[2:00 - 4:00] 启动一个城市场景
- 让四足机器人在城市街道上漫游
- 展示相机视角切换(俯瞰 / 第三人称 / 第一人称)
- 强调:相机/LiDAR 数据可以通过 ROS2 topic 接入
[4:00 - 6:00] 用手柄/键盘控制机器人
- 让学生看到响应感
- 强调:物理基于 MuJoCo,运动学约束真实
[6:00 - 8:00] 展示 ROS2 接入
- 开另一个终端:rqt 看 topic 列表
- 启动一个 SLAM 或导航节点
- 强调:"和我们前几周学的 ROS2 完全兼容"
[8:00 - 10:00] 总结 & Q&A
- 为什么用 UE5?→ 视觉模型可以训练成更接近真实
- Sim2Real 怎么做?→ Domain Randomization 在这里设置
- 学生可以做什么?→ 留作业:思考如何用 PyBullet 仿真训练,
再迁移到 MATRiX 这种高保真仿真验证
演示前检查清单
- [ ] 笔记本电源接好(UE5 + GPU 很耗电)
- [ ] 提前
bash scripts/release_manager/install_chunks.sh 0.1.2完成 - [ ] 提前下载 2-3 个常用地图(避免现场下载)
- [ ] 测试投影分辨率(UE5 高分辨率渲染流畅度)
- [ ] 准备一个手柄(演示效果更好)
- [ ] 录屏软件(备份录像,作为下次离线播放)
13.8.6 选修拓展任务
适合电脑有独显的同学(可作为期末项目加分):
- 场景搭建:用 MATRiX 自定义场景(按 Custom Scene Guide)
- 数据采集:在 MATRiX 中跑机器人,采集相机/LiDAR 数据用于训练
- Sim2Real 对比:同一控制策略在 PyBullet 和 MATRiX 中跑,对比效果
- 多机器人协同:参考 Multi-Robot Tutorial
没有独显的同学也能做的扩展:
- MuJoCo 学习(CPU 即可):
pip install mujoco,跑 MuJoCo 自带 4 足模型 - 看 MATRiX 源码:阅读
src/目录理解工业级仿真器的架构 - 写技术对比报告:PyBullet / MuJoCo / Gazebo / MATRiX 的差异分析
13.8.7 进一步学习
- 📚 MATRiX 官方文档
- 💬 MATRiX 微信社区(README 中扫码)
- 🎬 课堂演示录像(教师上传到课程仓库的
demos/目录) - 🔬 MuJoCo 官网 - MATRiX 的物理核心
- 🎮 Unreal Engine 学习路径
13.9 课后深造 — 深蓝学院课程推荐
🎓 本课只是机器人/AI 的入门。想真正进入这个领域,强烈推荐去 深蓝学院(ShenLan XueYuan) 系统学习。
13.9.1 关于深蓝学院
深蓝学院 是国内最大、最专业的机器人 / 无人驾驶 / 计算机视觉在线教育平台之一:
- 👨🏫 讲师阵容:高校教授(清华、北大、浙大、上交、港中文等)+ 工业界专家(百度 Apollo、华为、小马智行、文远知行、Momenta 等)
- 📚 课程深度:从基础理论到工业级项目,配套有论文阅读、代码实战、答辩等
- 🎓 学习方式:直播 + 录播,配有专属答疑群、助教
- 🏆 优势:每个课程都有对应的工业实战项目,学完直接可以做项目/写论文/进大厂
13.9.2 与本课程对应的推荐课程
按你在本课程的兴趣方向推荐:
🤖 机器人方向(对应 Week 4-5, 13)
| 课程 | 推荐理由 | 难度 |
|---|---|---|
| ROS 入门到精通 | 把 Week 2-8 学的 ROS2 系统化 | ⭐⭐ |
| 机器人运动规划 | 深入 Week 5 学的运动学 | ⭐⭐⭐⭐ |
| 机械臂控制理论与实战 | 工业机器人核心课程 | ⭐⭐⭐⭐ |
| 四足/双足机器人控制 | 进阶 Week 13 内容 | ⭐⭐⭐⭐⭐ |
| 强化学习与机器人控制 | 现代腿足机器人主流方法 | ⭐⭐⭐⭐⭐ |
👁️ 计算机视觉方向(对应 Week 9-12)
| 课程 | 推荐理由 | 难度 |
|---|---|---|
| 三维视觉与SLAM基础 | 系统讲 SLAM 理论 | ⭐⭐⭐ |
| 视觉 SLAM 进阶 | 高翔老师明星课程 | ⭐⭐⭐⭐ |
| 激光 SLAM 理论与实践 | 激光雷达 SLAM 必学 | ⭐⭐⭐⭐ |
| 多传感器融合定位 | 自动驾驶/机器人定位核心 | ⭐⭐⭐⭐ |
| YOLO 系列与实时检测 | 进阶 Week 10 内容 | ⭐⭐⭐ |
| 目标跟踪与多目标跟踪 | 进阶 Week 11 内容 | ⭐⭐⭐⭐ |
| 深度学习与计算机视觉 | CV 必学基础 | ⭐⭐⭐ |
🚗 自动驾驶方向(对应 Week 6 KITTI)
| 课程 | 推荐理由 | 难度 |
|---|---|---|
| 自动驾驶感知与定位 | 从传感器到地图全栈 | ⭐⭐⭐⭐ |
| 决策规划与控制 | Apollo 工程师必学 | ⭐⭐⭐⭐ |
| 端到端自动驾驶(热门 🔥) | 大模型时代新方向 | ⭐⭐⭐⭐⭐ |
| BEV 感知与 Transformer | 当前主流量产方案 | ⭐⭐⭐⭐⭐ |
🧠 AI / 大模型方向(前沿)
| 课程 | 推荐理由 | 难度 |
|---|---|---|
| 大语言模型(LLM)原理与实战 | 入行大模型 | ⭐⭐⭐⭐ |
| 具身智能(Embodied AI)(热门 🔥) | 机器人 + 大模型,最前沿 | ⭐⭐⭐⭐⭐ |
| 多模态大模型 | GPT-4V / Sora 背后技术 | ⭐⭐⭐⭐⭐ |
| VLA(视觉-语言-动作) | 机器人新范式 | ⭐⭐⭐⭐⭐ |
13.9.3 学习路径建议
根据你的期末项目方向,推荐三条学习路径:
🛤️ 路径 A:移动机器人方向
本课程 → ROS 入门精通 → 视觉 SLAM 基础 → 视觉 SLAM 进阶
→ 机器人运动规划 → 强化学习与机器人控制
适合:想做服务机器人、四足机器人、巡检机器人
就业:宇树、云深处、追觅、智元等
🛤️ 路径 B:自动驾驶方向
本课程 → 自动驾驶感知与定位 → BEV 感知与 Transformer
→ 决策规划与控制 → 端到端自动驾驶
适合:想做无人车感知/规控
就业:小马智行、文远知行、Momenta、华为车 BU、特斯拉等
🛤️ 路径 C:具身智能方向(最热门)
本课程 → 深度学习与CV → 大语言模型原理与实战
→ 具身智能(Embodied AI)→ VLA 模型实战
适合:想做人形机器人、家庭机器人
就业:宇树人形、银河通用、星动纪元、智元、 Figure AI、Physical Intelligence
13.9.4 学习方法建议
💡 老师过来人的经验
不要一上来就报 5 门课 先选 1 门自己最感兴趣的深耕,比如做完 SLAM 课程的所有作业,远比看 5 门课的录播有用
跟着课程动手写代码 不要看视频,看完就忘。一定要在自己机器上跑通每个 demo
结合论文阅读 深蓝学院每门课会推荐相关论文,把核心论文当作课程教材读
加群提问 + 找人组队 学习社区是最大资产,跟同学一起做项目、互相 review 代码
定期输出 写技术博客(CSDN/知乎/掘金/Notion),把学到的东西讲明白才是真学会了
13.9.5 其他优秀学习资源
除了深蓝学院,这些也值得参考:
| 平台 | 特点 | 适合 |
|---|---|---|
| 📺 B站 | 大量优质免费机器人/AI 教程 | 入门补充 |
| 🎓 Coursera | 国外名校(CMU、宾大、ETH)机器人课 | 系统学英语课程 |
| 🤖 MIT OpenCourseWare | MIT 公开课,机器人/AI 经典 | 理论扎实 |
| 📚 Hugging Face | LLM/具身智能社区与教程 | 大模型方向 |
| 🛠️ 古月居 | 中文 ROS 社区 | ROS 实战 |
| 🌐 GitHub Awesome 系列 | 收录大量精选资源 | 自学路径图 |
13.9.6 关于继续读研 / 就业
如果学完深蓝学院的 2-3 门课程,你已经具备:
- ✅ 能独立完成一个机器人/AI 小项目
- ✅ 能读懂 SLAM/感知/规划的经典论文
- ✅ 简历上可以写出有内容的项目经历
- ✅ 面试时能聊清楚技术细节
这就足够:
- 🎓 申请国内外机器人/CV 方向硕博
- 💼 进入互联网/机器人/自动驾驶大厂
- 🚀 参加机器人竞赛(RoboMaster、RoboCup、CCFRC 等)
- 🏆 申请 GSoC、字节夏令营等
13.10 项目开发指导
13.10.1 项目开发检查清单
阶段1:基础搭建(应在第12周完成)
- [ ] GitHub仓库创建
- [ ] 开发环境配置(ROS2/OpenCV/YOLO等)
- [ ] 基本框架代码
- [ ] README.md初稿
阶段2:核心功能实现(第13周重点)
- [ ] 核心算法实现
- [ ] ROS2节点编写
- [ ] 基本功能测试
- [ ] 代码注释补充
阶段3:测试与完善(第13周末)
- [ ] 功能完整性测试
- [ ] 边界情况测试
- [ ] 性能优化
- [ ] Bug修复
阶段4:文档与演示(第14周或答辩前)
- [ ] README.md完善
- [ ] 录制演示视频(2-5分钟)
- [ ] 准备答辩PPT(可选)
- [ ] 代码整理提交
13.10.2 常见问题解答(FAQ)
Q1: 如何在没有真实机器人的情况下测试?
A: 使用仿真环境
# 选项1: Gazebo仿真
ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py
# 选项2: PyBullet仿真
python3 quadruped_sim.py
# 选项3: 使用录制的视频/数据
ros2 bag play recorded_data.bag
Q2: OpenCV找不到摄像头怎么办?
A: 使用视频文件或图片
# 方法1: 使用视频文件
cap = cv2.VideoCapture('test_video.mp4')
# 方法2: 使用图片序列
img = cv2.imread('test_image.jpg')
# 方法3: 检查摄像头索引
for i in range(5):
cap = cv2.VideoCapture(i)
if cap.isOpened():
print(f"摄像头{i}可用")
break
Q3: ROS2节点通信失败?
A: 调试步骤
# 1. 检查节点是否运行
ros2 node list
# 2. 检查话题是否发布
ros2 topic list
ros2 topic echo /your_topic
# 3. 检查消息类型
ros2 interface show sensor_msgs/msg/Image
# 4. 查看节点信息
ros2 node info /your_node
Q4: YOLO检测太慢?
A: 性能优化方法
# 方法1: 使用更小的模型
model = YOLO('yolov8n.pt') # n < s < m < l
# 方法2: 降低图像分辨率
img = cv2.resize(img, (640, 480))
# 方法3: 跳帧处理
frame_count = 0
if frame_count % 3 == 0: # 每3帧处理一次
results = model(frame)
frame_count += 1
# 方法4: 使用GPU(如果有)
model = YOLO('yolov8n.pt')
model.to('cuda')
Q5: GitHub提交遇到问题?
A: 常用Git命令
# 克隆仓库
git clone https://github.com/username/repo.git
# 查看状态
git status
# 添加文件
git add .
# 提交
git commit -m "实现颜色检测功能"
# 推送
git push
# 如果遇到冲突
git pull
# 解决冲突后再push
13.10.3 项目展示准备
演示视频录制要点
- 时长: 2-5分钟
内容结构:
- 开场(10秒):项目名称、团队成员 - 功能演示(1-2分钟):展示核心功能 - 技术介绍(1分钟):使用的技术栈 - 结果展示(30秒):效果截图/数据 - 总结(20秒):总结与展望录制工具:
- Windows: Xbox Game Bar (Win+G)
- Mac: QuickTime Player
- Linux: SimpleScreenRecorder
- 全平台: OBS Studio
注意事项:
- 声音清晰(可后期配音)
- 画面流畅(建议30fps)
- 突出重点功能
- 展示实际效果
README.md模板
# 项目名称
**团队成员**: XXX, YYY, ZZZ
## 项目简介
简要描述项目目标和功能(2-3句话)
## 功能特性
- [x] 功能1:xxx
- [x] 功能2:xxx
- [ ] 功能3(扩展):xxx
## 技术栈
- ROS2 Humble
- OpenCV 4.x
- YOLO v8
- Python 3.10
## 快速开始
### 安装依赖
\`\`\`bash
pip install -r requirements.txt
\`\`\`
### 运行
\`\`\`bash
# 启动ROS2节点
ros2 run your_package your_node
# 或使用launch文件
ros2 launch your_package main.launch.py
\`\`\`
## 项目结构
\`\`\`
project/
├── src/ # 源代码
│ ├── detector.py # 检测模块
│ └── controller.py # 控制模块
├── launch/ # ROS2启动文件
├── config/ # 配置文件
├── docs/ # 文档
│ └── demo.mp4 # 演示视频
└── README.md
\`\`\`
## 演示视频
[点击观看演示视频](docs/demo.mp4)
或

## 运行效果


## 遇到的问题与解决方案
### 问题1: xxx
**解决方案**: xxx
### 问题2: xxx
**解决方案**: xxx
## 未来改进
- [ ] 改进1
- [ ] 改进2
## 参考资料
1. [参考链接1](https://...)
2. [参考链接2](https://...)
## 致谢
感谢老师的指导和同学的帮助!
13.10.4 项目评分细则
| 评分项 | 权重 | 优秀(90-100) | 良好(75-89) | 及格(60-74) | 不及格(<60) |
|---|---|---|---|---|---|
| 功能完整度 | 40% | 核心功能+扩展功能 | 核心功能完整 | 核心功能部分实现 | 功能不完整 |
| 技术难度 | 30% | 复杂算法+创新 | 使用多种技术 | 基本技术应用 | 技术过于简单 |
| 代码质量 | 15% | 结构清晰+注释完整 | 可读性好 | 可运行 | 代码混乱 |
| 文档报告 | 15% | 文档详细+视频优秀 | 文档完整 | 基本说明 | 文档缺失 |
加分项:
- 🌟 开源贡献(+5分)
- 🌟 创新性强(+5分)
- 🌟 实际部署(+10分)
- 🌟 技术难度高(+5分)
本周作业
✅ 必做
| 序号 | 任务 | 截止 | 完成 |
|---|---|---|---|
| 1 | 完成PyBullet仿真实验 | 本周三 | ☐ |
| 2 | 项目核心功能实现 | 本周五 | ☐ |
| 3 | 项目功能测试 | 本周六 | ☐ |
| 4 | 录制演示视频 | 本周日 | ☐ |
| 5 | 提交最终代码 | 下周一 | ☐ |
📦 提交清单
最终提交内容:
提交到GitHub仓库:
✓ 完整源代码
✓ README.md
✓ requirements.txt
✓ 演示视频
✓ 效果截图/数据
提交到课程平台:
✓ GitHub仓库链接
✓ 演示视频链接
✓ 项目报告PDF(可选)
参考资料
四足机器人
教材:
- 《腿足机器人导论》 - MIT Press
- 《动态行走机器人》 - Springer
开源项目:
论文:
- "Learning Quadrupedal Locomotion over Challenging Terrain" (MIT, 2020)
- "RMA: Rapid Motor Adaptation for Legged Robots" (Berkeley, 2021)
PyBullet
课程总结
课程知识体系回顾:
┌─────────────────────────────────────────────────────────────┐
│ AI机器人课程 │
├─────────────────────────────────────────────────────────────┤
│ │
│ Week 1-3: 基础环境 │
│ ├── WSL + Ubuntu + ROS2 │
│ ├── Git + GitHub + VSCode │
│ └── 命令行操作 │
│ │
│ Week 4-8: 机器人基础 │
│ ├── Python编程 │
│ ├── 机器人运动学 │
│ ├── 传感器与数据处理 │
│ ├── Docker容器 │
│ └── Markdown文档 │
│ │
│ Week 9: 数学基础(网课) │
│ ├── 线性代数:矩阵、变换 │
│ ├── 运动学:正逆运动学、雅可比 │
│ └── 视觉数学:卷积、特征提取 │
│ │
│ Week 10-11: AI视觉 │
│ ├── YOLO目标检测 │
│ └── Sort目标追踪 │
│ │
│ Week 12-13: 综合应用 │
│ ├── OpenCV视觉处理 │
│ ├── 语音识别/合成 │
│ ├── 四足机器人入门 │
│ └── 期末项目实战 │
│ │
└─────────────────────────────────────────────────────────────┘
寄语
🎓 恭喜你完成了AI机器人课程的学习!
从零开始,你已经掌握了:
- Linux命令行与ROS2基础
- 计算机视觉与深度学习
- 机器人控制的数学原理
- 实际项目开发能力
这只是开始,机器人和AI的世界还有更多精彩等待探索!
下一步建议:
- 深入学习某个感兴趣的方向(视觉/控制/规划)
- 参加机器人竞赛(RoboCup、ICRA等)
- 阅读前沿论文,关注ICRA、IROS、RSS会议
- 为开源项目贡献代码
- 考虑研究生深造或相关领域工作
保持联系:
- 课程GitHub: ai-robot-class
- 课程网站: course.a-real.me
祝未来一切顺利,期待你在AI机器人领域的精彩表现!🚀
第13周结束!课程完成!
期末项目加油,我们答辩见!