第 14 周:手机遥控 + 局域网通信 + 仿真机器人迷宫探索(小组项目)
课时:3 小时(一次课,配合课后小组完成)
🎯 本周一句话目标
用你自己写的手机网页,通过 Tailscale 局域网,把控制指令送进 WSL 里的仿真程序,让 四足机器人或 turtlesim 乌龟 在迷宫里走起来。
本周不是再学一个新算法,而是把前面几周学到的东西串成一条完整的工程链路,并以小组项目的形式交付。
14.0 配套资料:讲解视频与 PPT
本周项目讲义配套了一份讲解 PPT 和一段带中文配音的讲解视频,建议先用 3 分钟看完视频,对整个项目建立整体印象,再往下看细节。
第 14 周项目讲解视频。配音使用开源项目 voicebox 的 Chatterbox 多语种引擎,由授课老师本人录音克隆生成。
本周讲义已升级:迷宫改为更复杂、更逼真的真正迷宫(机器狗方向用算法生成的完美迷宫并加入撞墙碰撞与终点判定),新增一键 Docker 环境让项目在自己电脑上就能跑,并补充了如何动手改代码完成项目与小组报告书写法(人数/页数)。
- 📊 讲解 PPT:
week14_project/week14_briefing_slides.pptx(16:9) - 🎬 讲解视频:
week14_project/week14_briefing_video.mp4 - 📝 配音脚本:
week14_project/narration_script.md
下面是 PPT 的前几页预览:


14.1 项目总览
14.1.1 统一的控制链路
第 14 周的小组项目统一围绕下面这条链路展开:
手机控制输入 -> Tailscale 局域网 -> WSL / ROS / 仿真程序 -> 机器人运动
这条链路里每一段都对应着本课程之前学过的内容:
| 链路环节 | 用到的旧知识 | 本周新增的工程理解 |
|---|---|---|
| 手机控制输入 | 第 11 周网页部署、HTML/JS | 把网页当作手柄输入设备 |
| Tailscale 局域网 | 第 12 周手机摄像头组网 | 手机和电脑进入同一虚拟网段 |
| WSL / ROS / 仿真 | 第 2、8、13 周环境与仿真 | 网络接收 + 机器人控制写在同一个程序里 |
| 机器人运动 | 第 13 周四足机器人 / ROS2 | 前进 / 后退 / 左转 / 右转 + 迷宫探索 |
14.1.2 两个方向,二选一
每组从下面两个方向中选择一个完成。
| 方向 | 场景 | 控制对象 | 目标 | 起始代码 |
|---|---|---|---|---|
| 方向 A | PyBullet 三维迷宫 | 四足机器人(机器狗) | 手机遥控完成迷宫探索 | week14_starters/pybullet_dog/ |
| 方向 B | turtlesim 二维平面 | ROS2 乌龟 | 手机遥控完成迷宫探索 | week14_starters/turtlesim_remote/ |
方向 A 偏“三维 + 物理仿真”,画面更酷;方向 B 偏“ROS2 标准链路”,更贴近真实机器人软件栈。两条路线难度相当,按小组兴趣选择即可。
14.1.3 统一要求
不论选哪个方向,每组都必须做到:
- 手机作为控制手柄输入
- 自己实现一个简单的遥控器网页
- 手机和电脑通过 Tailscale 进入同一个虚拟局域网
- 能够控制四足机器人 / turtlesim 乌龟完成:
- 前进
- 后退
- 左转
- 右转
- 最终需要在迷宫环境中完成探索任务
⭐ 自动探索要求(重点):
- 方向 B(小乌龟):要求让乌龟自动走出迷宫(用算法如右手法则 / BFS/A*,或接入智能 Agent 如 OpenClaw,见 14.8.5),不能只靠手动遥控。起始代码已给出可用的
explorer.py巡墙器参考实现。- 方向 A(机器狗):手动遥控即可达标;但当小组为 4 人及以上时,要求实现自动探索迷宫(写算法或接入智能 Agent 均可)。
14.1.4 人数与选题建议
请按小组人数选择方向,并据此安排分工:
| 小组人数 | 建议方向 | 自动探索 | 理由与分工 |
|---|---|---|---|
| 3 人 | 方向 A:机器狗(PyBullet) | 加分项 | 分工:①网络/网页 ②迷宫与碰撞 ③可视化/报告 |
| 4 人及以上 | 方向 A:机器狗(PyBullet) | 必做 | 分工:①网络/网页 ②迷宫与碰撞 ③自动探索算法 ④报告与测试 |
| 2 人 | 方向 B:小乌龟(turtlesim) | 必做 | 一人主攻桥接程序、一人主攻网页与自动探索算法 |
| 1 人(可单人) | 方向 B:小乌龟(turtlesim) | 必做 | 桥接已内置碰撞,集中精力打通链路 + 写自动探索算法 |
简单说:人多做机器狗、人少做小乌龟、单人也欢迎。其中小乌龟必须做自动探索(用算法自动走出迷宫),机器狗满 4 人也必须做自动探索。方向 A 偏“三维 + 物理仿真”,画面更酷;方向 B 偏“ROS2 标准链路”,更贴近真实机器人软件栈。
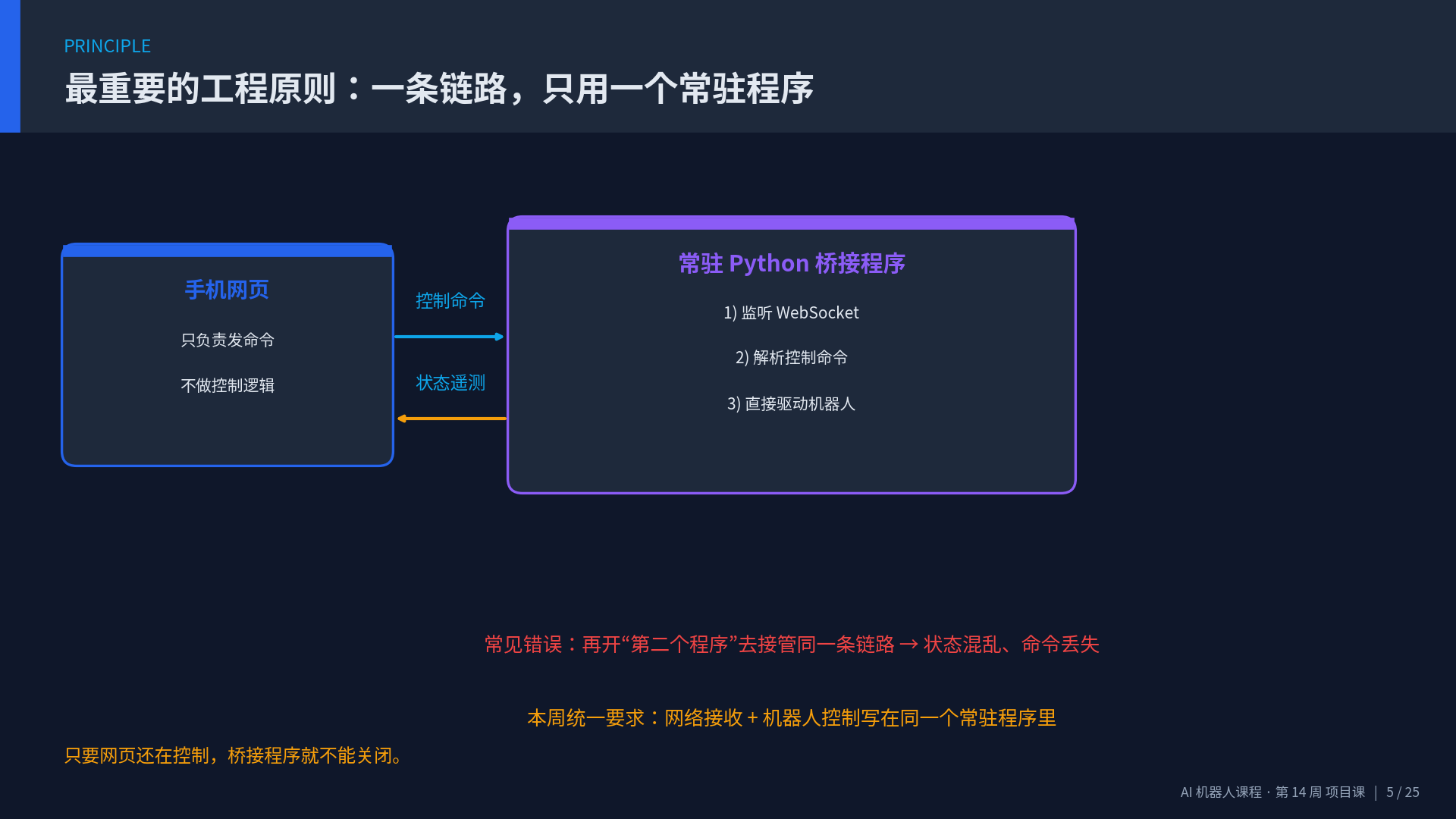
14.2 关键设计原则:一条控制链路,只用一个常驻程序
这是本周最重要、也是最容易做错的工程概念,请务必理解。
两套起始代码都遵循同一个组织原则:
- 桥接程序在实验期间需要持续运行
- 手机网页只负责发送控制指令
- 网络接收与机器人控制逻辑放在同一个 Python 程序中
- 不再额外启动第二个程序去重复接管同一条控制链路
用一张图来理解:
┌──────────────┐ WebSocket 控制命令 ┌────────────────────────────┐
│ 手机网页 │ ───────────────────────▶ │ 常驻 Python 桥接程序 │
│ (遥控器界面) │ │ ┌──────────────────────┐ │
│ 前/后/左/右 │ ◀─────────────────────── │ │ 1) 监听网络/WebSocket │ │
└──────────────┘ 机器人状态回传(遥测) │ │ 2) 解析控制命令 │ │
│ │ 3) 直接驱动机器人 │ │
│ └──────────────────────┘ │
│ PyBullet / ROS2 │
└────────────────────────────┘
⚠️ 常见错误:有的同学会写“一个程序收网络命令,再开第二个程序去读命令、再控制机器人”。这会让同一条控制链路被两个程序抢着接管,状态混乱、命令丢失。本周统一要求:接收网络 + 控制机器人写在同一个常驻程序里。
只要网页还在控制,桥接程序就不能关闭。
14.3 通用环境准备:Tailscale 局域网
这一步两个方向完全一样,和第 12 周“手机摄像头接入 WSL”用的是同一套方法。
14.3.1 为什么必须用 Tailscale
在校园网 / 机房环境中,手机直接访问 WSL 几乎一定失败,原因有两个:
- 校园网 AP 隔离:手机和电脑虽然连同一个 Wi-Fi,但设备之间被禁止互访。
- WSL2 NAT 隔离:WSL2 是 Windows 内部的一个独立子网,手机很难直接访问它的内部地址。
Tailscale 给手机和WSL都分配一个同网段的虚拟地址(通常是 100.x.y.z),从而绕过上面两个限制。
14.3.2 推荐:一人一网(Tailnet)
- 每位同学用自己的 GitHub / Google 账号注册 Tailscale
- 手机端和 WSL 端登录同一个账号
- 每个学生的虚拟网络里只有自己的电脑和手机,互不干扰
14.3.3 WSL 端安装与启动
curl -fsSL https://tailscale.com/install.sh | sh
sudo service tailscaled start
sudo tailscale up
按提示登录后,查询 WSL 在 Tailnet 中的地址:
tailscale ip -4
记下这个 100.x.y.z 地址,后面手机浏览器要用它来打开遥控器网页。
14.3.4 推荐:用 Docker 一键准备运行环境
考虑到大家要在自己的电脑上跑,本周提供了一套 Docker 环境,复用第 10/11 周配置过的 ROS2 桌面镜像 ghcr.io/tiryoh/ros2-desktop-vnc:humble。它自带一个浏览器里的 Linux 桌面(noVNC),所以 turtlesim 和 PyBullet 的图形窗口都能在浏览器里看到,不用在 Windows 上单独装 ROS2。
cd week14_starters/docker
docker compose up -d
# 浏览器打开桌面(默认密码 ubuntu)
# http://localhost:6080
# 在桌面终端里安装依赖(只需一次)
cd ~/week14_starters/docker && bash setup.sh
端口已经映射好:
| 端口 | 用途 |
|---|---|
6080 |
浏览器 noVNC 桌面(看仿真画面) |
8765 |
方向 A(机器狗)网页控制器 |
8080 |
方向 B(小乌龟)网页控制器 |
手机怎么连:容器把
8765 / 8080映射到了宿主机,所以 Tailscale 仍然装在宿主机上(见 14.3.3),手机访问http://<宿主机Tailscale_IP>:8765(或:8080)即可,不必在容器里再装 Tailscale。代码挂载在~/week14_starters,你在宿主机改代码、容器里直接重跑。详见week14_starters/docker/README.md。
14.4 方向 A:手机遥控 PyBullet 机器狗迷宫
14.4.1 起始代码结构
week14_starters/pybullet_dog/
├── server.py # 常驻程序:PyBullet 仿真 + WebSocket 服务 + 碰撞/终点判定
├── maze.py # 迷宫生成与配置(算法生成的“完美迷宫”,含起点/终点/墙体)
├── explorer.py # 自动探索(右手法则巡墙器;3人加分、4人及以上必做)
├── index.html # 手机遥控器网页(带实时俯视图:墙体/终点/轨迹)
└── requirements.txt # aiohttp + pybullet
起始代码已经做了职责拆分:
maze.py管“地图长什么样”,server.py管“仿真和网络怎么跑”,explorer.py管“自动怎么走”。这正是后面 14.7 节要讲的——改代码时你主要动哪个文件,一目了然。
14.4.2 安装与启动
cd week14_starters/pybullet_dog
pip install -r requirements.txt
python3 server.py
启动后默认监听:
http://0.0.0.0:8765
手机和电脑进入同一个 Tailscale 网络后,在手机浏览器打开:
http://<WSL的Tailscale_IP>:8765
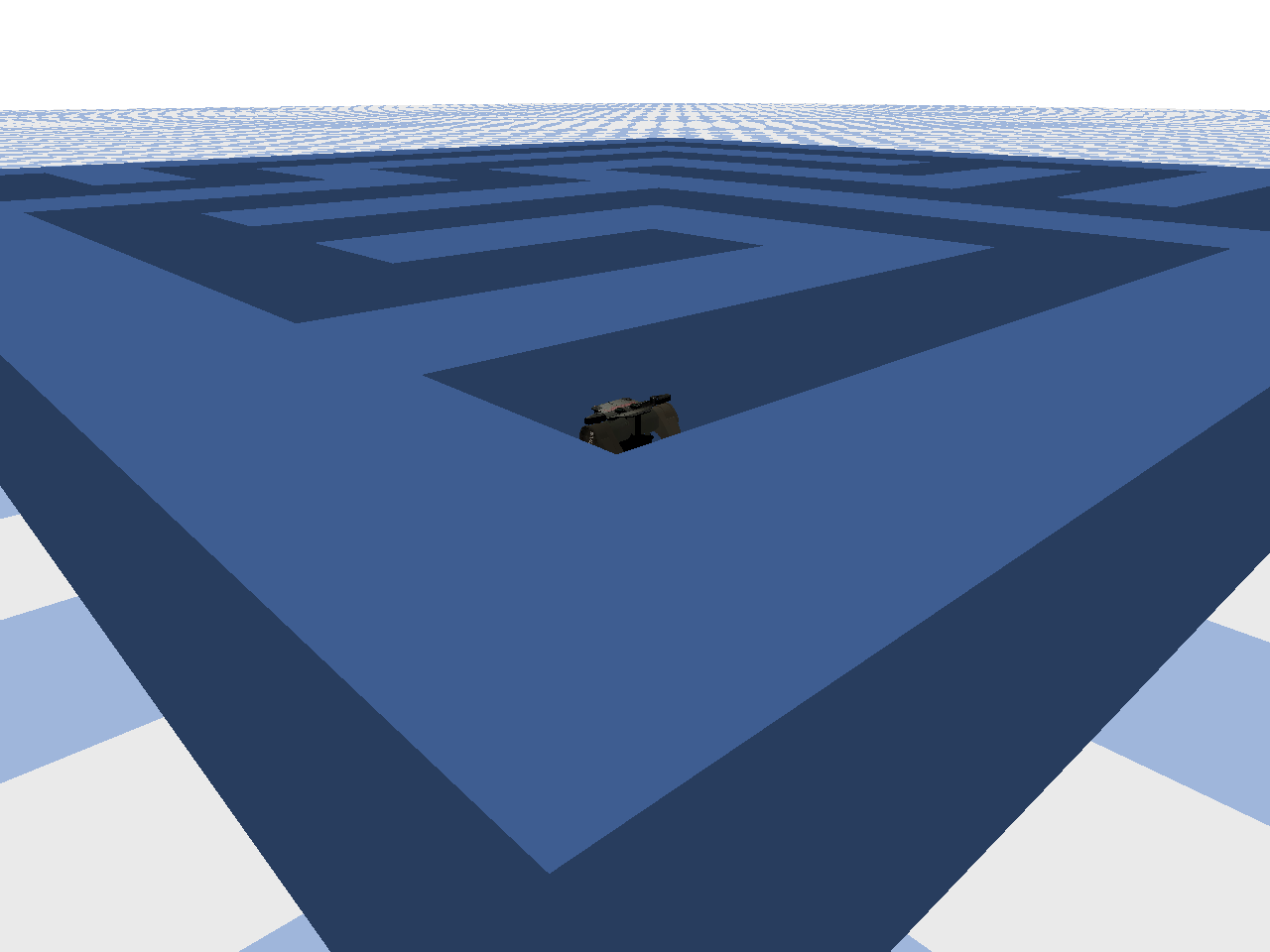
14.4.3 项目初始环境:三维迷宫长什么样
server.py 启动后会调用 maze.py 用递归回溯算法生成一个“完美迷宫”(任意两点之间有且只有一条通路,天然带很多死路),用蓝色墙体搭起来,并在左下角放一只四足机器人(laikago)、左下角放橙色起点盘、右上角放绿色终点盘。机器狗撞墙会被真正挡住,走进绿色终点圈即判定“到达终点”。下面是直接运行起始代码渲染出来的初始画面:
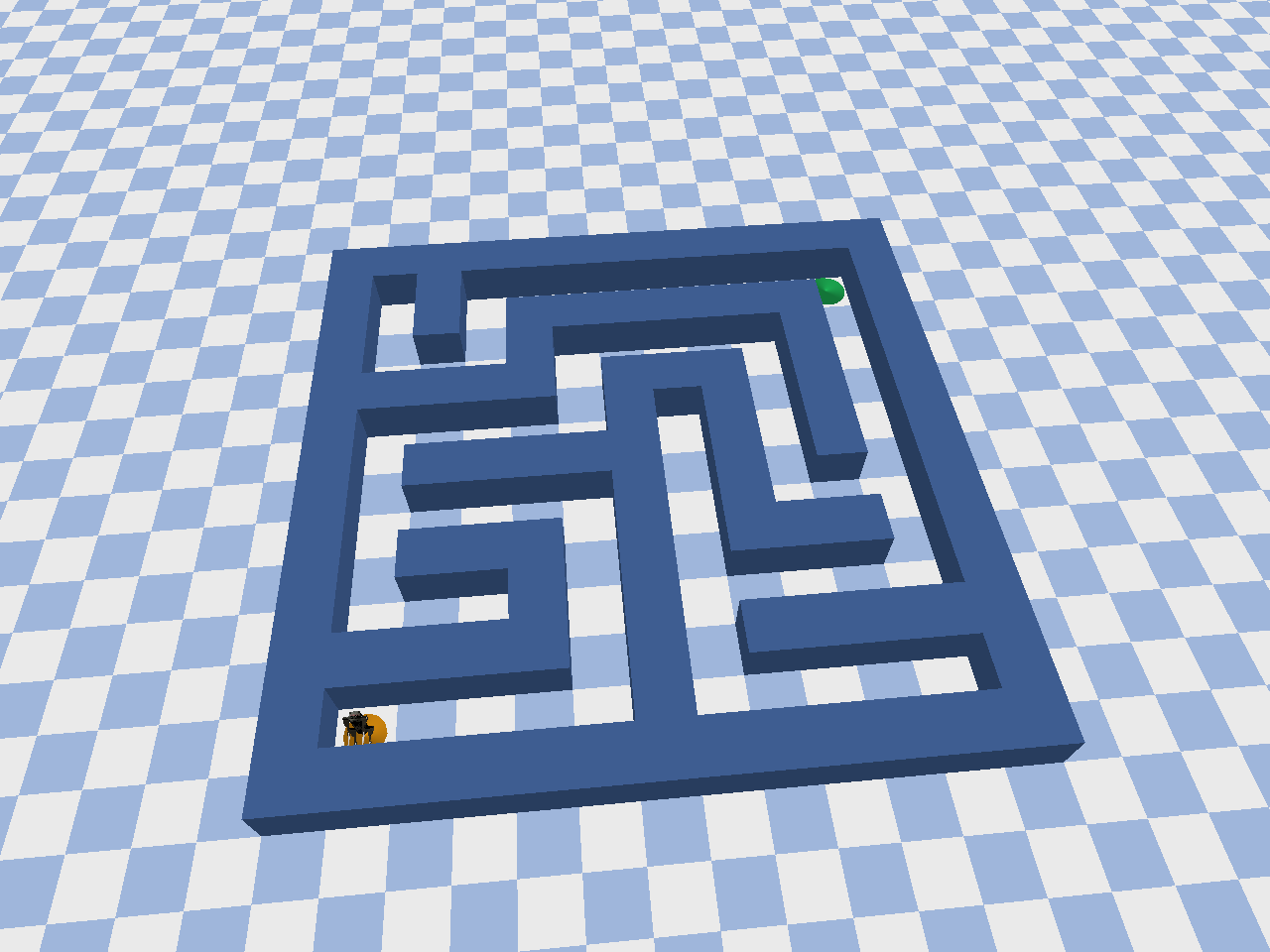
方向 A 初始环境总览:算法生成的 13m×13m 完美迷宫(橙色起点、绿色终点),机器狗从左下角出发,目标是走到右上角绿色终点。
14.4.4 server.py 的关键设计
起始代码把“仿真 + 迷宫 + 机器人 + 网络”都放在一个程序里,核心逻辑如下:
- 搭建世界
_build_world():加载地面、从maze.py取墙体用createMultiBody拼迷宫、放起点/终点圆盘、加载四足机器人。 - 接收命令
set_command(move, turn):move表示前进/后退,turn表示左转/右转。 - 撞墙检测
_hits_wall(x, y):把机器狗当成一个半径DOG_RADIUS的圆,检测它和任何墙体包围盒是否相交。 - 运动更新
step(dt):先更新朝向(转向永远允许),再尝试前进;如果下一步会撞墙就原地不动并标记blocked;走进终点圈则标记goal_reached并停车。 - WebSocket
/ws:接收手机command / stop / reset,把状态(位置、朝向、blocked、goal_reached、迷宫数据)回传给网页画俯视图。 - 仿真循环
simulation_loop:固定频率推进仿真,向所有网页广播状态。
def step(self, dt):
position, orientation = p.getBasePositionAndOrientation(self.robot_id)
yaw = p.getEulerFromQuaternion(orientation)[2]
if self.goal_reached: # 到终点后锁定
p.stepSimulation(); return
yaw += self.command["turn"] * TURN_SPEED * dt # 先转向
nx = position[0] + self.command["move"] * MOVE_SPEED * math.cos(yaw) * dt
ny = position[1] + self.command["move"] * MOVE_SPEED * math.sin(yaw) * dt
if self.command["move"] != 0.0 and self._hits_wall(nx, ny):
self.blocked = True
nx, ny = position[0], position[1] # 撞墙:保持原位
else:
self.blocked = False
# ... 更新位姿、判断是否进入终点圈 ...
14.5 方向 B:手机遥控 turtlesim 乌龟迷宫
14.5.1 起始代码结构
week14_starters/turtlesim_remote/
├── turtlesim_web_bridge.py # 常驻程序:ROS2 节点 + 迷宫规则 + 碰撞 + WebSocket 服务
├── explorer.py # 自动探索(按格右手法则巡墙器,可走通完美迷宫,必做)
├── index.html # 手机遥控器网页(含二维迷宫预览)
└── requirements.txt # aiohttp
方向 B 默认你已经有可用的 ROS2 Humble + turtlesim(第 2 周已配置)。
14.5.2 启动方式(注意顺序)
第 1 步:启动 turtlesim
source /opt/ros/humble/setup.bash
ros2 run turtlesim turtlesim_node
第 2 步:另开一个终端,启动网页桥接程序
source /opt/ros/humble/setup.bash
cd week14_starters/turtlesim_remote
pip install -r requirements.txt
python3 turtlesim_web_bridge.py
默认监听:
http://0.0.0.0:8080
第 3 步:手机打开遥控器
http://<WSL的Tailscale_IP>:8080
运行顺序固定:
turtlesim_node先开 →turtlesim_web_bridge.py常驻 → 手机连接。桥接程序一旦关闭,就没有程序把命令发布到 ROS2 了。
14.5.3 项目初始环境:二维迷宫长什么样
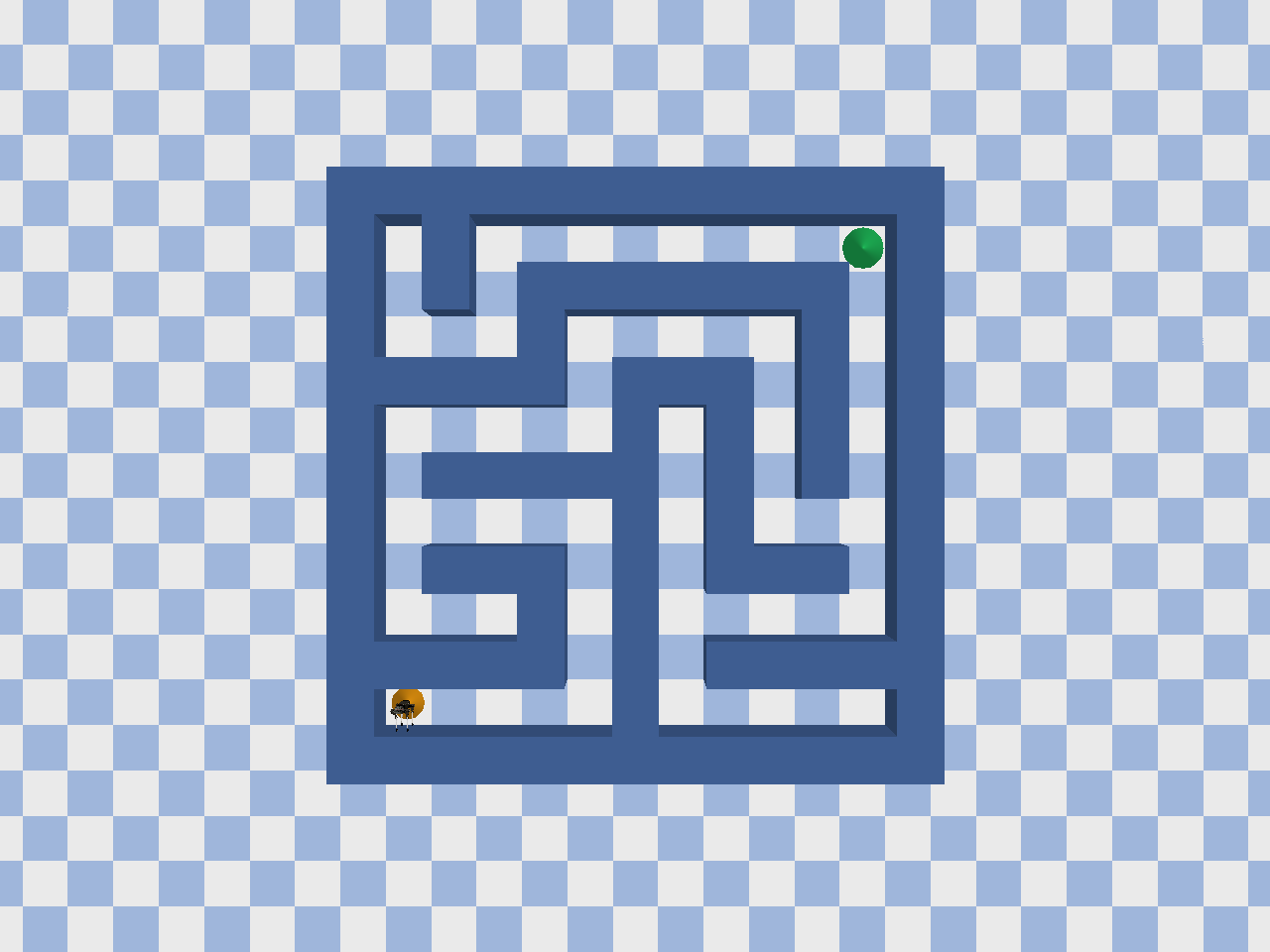
和方向 A 不同,方向 B 的迷宫边界、障碍物、碰撞规则、起点和终点都已经内置在桥接程序里。本周迷宫升级为一个 4×4 单元的“完美迷宫”(用递归回溯算法生成,已用 BFS 验证从起点到终点一定有解,走廊约 2.2 宽、天然带死路与分叉),非常适合用“沿墙走 / 自动探索”算法求解。迷宫定义(与 turtlesim_web_bridge.py 的 OBSTACLES 完全一致)渲染如下(红色虚线是其中一条可行通关路线):
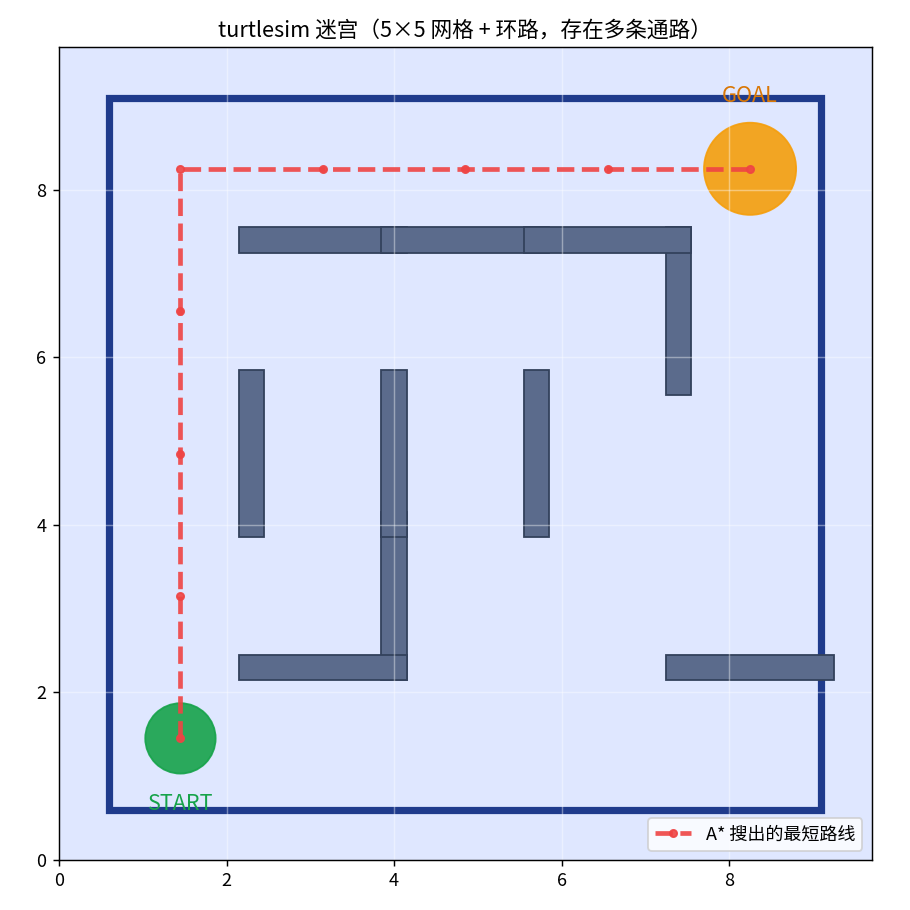
方向 B 初始环境:4×4 完美迷宫(已验证有解),绿色为起点(START),橙色为终点(GOAL),灰色矩形为障碍墙,红色虚线为一条可行通关路线。
14.5.4 桥接程序已内置的迷宫规则
turtlesim_web_bridge.py 比方向 A 多做了不少“安全”工作:
| 功能 | 说明 |
|---|---|
发布 /turtle1/cmd_vel |
把手机命令转成 ROS2 速度指令 |
订阅 /turtle1/pose |
实时获取乌龟位置 |
边界检测 would_hit_boundary |
预测下一步是否越界 |
障碍物检测 would_hit_obstacle |
预测下一步是否撞墙(带半径膨胀) |
碰撞阻挡 compute_safe_motion |
会撞就把前进速度设为 0,并返回 reason |
终点判定 is_inside_goal |
进入终点圆形区域即 goal_reached |
复位 reset_to_start |
用 teleport_absolute 把乌龟送回起点 |
这意味着学生用手机一直按“前进”撞到墙时,乌龟会被自动挡住,遥测里会显示 blocked: true, reason: obstacle。
14.6 自己实现遥控器网页
“自己实现一个简单的遥控器网页”是统一要求之一。起始代码已经给了一个可用的 index.html,你可以直接用它,也可以在它的基础上改造美化。两套遥控器跑通后的实际界面如下:


14.6.1 遥控器网页的三个要点
方向键长按持续控制,松开即停 用
touchstart / touchend(以及鼠标的mousedown / mouseup)来发命令,松手立刻发stop,避免乌龟/机器狗“一直跑停不下来”。button.addEventListener("touchstart", () => sendCommand(move, turn), { passive: false }); button.addEventListener("touchend", () => stopRobot(), { passive: false });用 WebSocket 发送结构化命令 命令统一是一个 JSON:
socket.send(JSON.stringify({ type: "command", move: 1, turn: 0 })); // 方向 A socket.send(JSON.stringify({ type: "command", linear: 2.0, angular: 0.0 })); // 方向 B显示回传遥测 网页订阅桥接程序回传的状态,实时显示位置、朝向、是否被障碍物挡住,方便调试。
14.7 动手改代码:完成项目要写 / 改哪几个文件
本周项目不是从零写,而是在起始代码上“填空 + 扩展”。下面按文件告诉你改哪里、加什么,照着做就能从“跑通”一路做到“拿高分”。
14.7.1 一张表看清要动哪些文件
方向 A(机器狗)
| 文件 | 必做(跑通项目) | 进阶(加分) |
|---|---|---|
maze.py |
不改也能跑(已生成完美迷宫) | 改 COLS/ROWS/SEED 换更大更难的迷宫;或自定义墙体布局 |
index.html |
不改也能用(已有方向键 + 俯视图) | 美化界面、加“自动/手动”切换按钮、显示用时/碰撞次数 |
explorer.py |
3 人加分项 / 4 人及以上必做 | 完善右手法则,或改左手法则 / 记录走过的格子 |
server.py |
不改也能跑(4 人需接入自动模式) | 接入 explorer.py:加一个“自动模式”,自动模式下用 explorer.decide() 算命令 |
方向 B(小乌龟)
| 文件 | 必做(跑通项目) | 进阶(加分) |
|---|---|---|
turtlesim_web_bridge.py |
跑通默认迷宫;接入 explorer.py 加“自动模式” |
改 OBSTACLES 设计自己的迷宫 |
explorer.py |
必做:自动探索算法(已给右手法则巡墙器参考实现,理解并接好) | 改左手法则 / 用 BFS·A* 求最短路 / 统计用时 |
index.html |
不改也能用 | 加“自动/手动”按钮、迷宫预览加轨迹 |
⭐ 方向 B 的核心要求就是让乌龟用算法自动走出迷宫。
explorer.py里已给出一个按格推进的右手法则巡墙器(对完美迷宫一定能到终点,实测约 13 秒通关),你需要理解它并接到桥接程序的“自动模式”里,再做改进。
14.7.2 第一步:先把链路跑通(不写一行代码也能做到)
- 按 14.3 装好 Tailscale(或用 14.3.4 的 Docker)。
- 启动起始程序(方向 A 跑
server.py;方向 B 跑turtlesim_node+turtlesim_web_bridge.py)。 - 手机打开遥控器,确认前进 / 后退 / 左转 / 右转四个键都能用、撞墙会被挡住。
这一步通过,就已经拿到“链路打通”的基础分了。
14.7.3 第二步:改地图(动 1 个文件)
- 方向 A:打开
maze.py,把顶部的COLS = 6 / ROWS = 6调大(如8),或换一个SEED,迷宫立刻变大变难;想手工设计也可以把_carve_grid换成你自己的墙体列表。 - 方向 B:打开
turtlesim_web_bridge.py,在OBSTACLES里增删矩形(x,y是左下角,w,h是宽高),设计你自己的迷宫。
改完重启程序即可看到新迷宫——这一步就是把“迷宫设计”这一评分项做出来。
14.7.4 第三步:写自动探索(动 explorer.py)
这一步对小乌龟是必做,对机器狗满 4 人也是必做;其余情况是加分项。
explorer.py 已经给出可用的右手法则巡墙器参考实现(方向 A、方向 B 各一份,对完美迷宫都能自动走到终点),你的任务是理解它、接到主程序里,并做改进:
- 读懂
explorer.py里的decide()(按格推进的右手法则);在此基础上改进:改左手法则做对比、用比例控制让转弯更平滑、或干脆用 BFS/A* 直接算最短路径。 在主程序里接入它,加一个“自动模式”。以方向 A 为例,只要在仿真循环里这样几行:
from explorer import WallFollower self.explorer = WallFollower() # 仿真循环里,若处于自动模式: move, turn = self.explorer.decide(self.get_state()) self.set_command(move, turn)在
index.html加一个按钮,向后端发{"type": "auto"}切换自动 / 手动(后端收到后置一个self.auto = not self.auto标志)。
14.7.5 第四步:结果展示(动 index.html / 录屏)
- 把走过的轨迹画在网页俯视图上(方向 A 的
index.html已经画了轨迹,可继续加“用时 / 碰撞次数”统计)。 - 录一段从起点自动 / 手动走到终点的完整视频,作为成果。
小结:必做 = 跑通链路 + 改地图(动 1 个文件);加分 = 写好
explorer.py并接入主程序。整个项目你真正要写的代码量不大,重点是理解每个文件的职责。
14.8 项目进阶任务
完成上面四步后,可以继续打磨下面几类内容(评分会更高):
14.8.1 更难的迷宫地图
- 方向 A:调大
maze.py的COLS/ROWS,或换SEED生成不同迷宫;挑战手工设计带回路的迷宫。 - 方向 B:在
OBSTACLES里设计更曲折、带更多死路的布局。
14.8.2 更聪明的自动探索
- “沿墙走”(右手法则 / 左手法则)
- 撞墙后自动后退一点再转向
- 记录走过的格子,避免重复绕圈
14.8.3 碰撞处理
- 方向 B 已内置碰撞预测,可进一步:撞墙时自动选择新的方向。
- 方向 A 的撞墙检测已内置(
_hits_wall),可在此基础上做“撞墙自动避让”。
14.8.4 路径记录或结果展示
- 把走过的轨迹画在网页上 / 保存成图片
- 统计到达终点用时、碰撞次数
- 录一段完整探索过程的视频作为成果展示
14.8.5 用智能 Agent 代替人工遥控(OpenClaw 等,认可的完成方式)
除了“人手按方向键”和“自己写算法(右手法则 / BFS)”,也可以接入一个智能体(Agent)来开机器人——例如 OpenClaw 这类大模型 / Agent 框架,让 AI 自己看状态、做决策、发指令。这条路同样算作“自动探索达标”(满足小乌龟必做 / 机器狗满 4 人必做的要求)。提示要点:
- 接口不变,Agent 当“新大脑”:把 Agent 接到和网页一样的命令接口(WebSocket 发 JSON,或直接在常驻程序里调用
decide())。单一常驻程序原则照样适用——不要为 Agent 另开一条链路。 - 感知 → 决策 → 执行 闭环(sense–think–act):每个控制周期,把机器人状态整理成结构化文本喂给 Agent:位置
pose、朝向、是否撞墙blocked、是否到终点goal_reached、迷宫地图 / 障碍、可选的俯视图或摄像头画面。 - 把动作空间限制死:只给 Agent 一个很小的合法动作集合(
forward / back / left / right / stop,或线速度+角速度的范围),并在程序里做安全校验(撞墙就忽略前进),防止“幻觉指令”乱跑。 - System Prompt 要点:说明身份(迷宫探索机器人)、目标(到达终点坐标)、可用动作、各状态字段含义、严格的输出格式(如只输出
{"action":"forward"}的 JSON,不要解释)。 - 决策频率与成本:大模型推理慢、有延迟和费用。建议降低决策频率(如每 0.5–1 秒决策一次,期间沿用上一个动作),或采用分层:Agent 做高层规划(给出要走的格子序列),本地
explorer/ PID 做低层执行。 - 记忆 + 防打转:把“走过的格子 / 最近动作历史”一并放进上下文,提示它避免来回打转;可让它输出简短 reasoning 便于调试,但最终动作仍走 JSON。
- 失败兜底:网络超时、JSON 解析失败时,回退到本地算法(右手法则)或停止,保证安全;记录日志方便写报告。
- 报告里写清:用了哪个 Agent / 模型、Prompt 怎么设计、动作空间、决策频率、效果(成功率 / 用时 / 调用次数),以及与“硬编码算法”的对比和取舍。
一句话:Agent 只是换了“发命令的大脑”,桥接 / 常驻程序、碰撞规则、终点判定都不用动;把它当成一个会自己按方向键的“自动遥控器”即可。
14.9 小组报告书怎么写(人数 / 页数)
每组提交一份 PDF 报告书(A4),篇幅按人数来,平均每人约 2 页:
| 小组人数 | 报告书页数(A4,不含封面) | 备注 |
|---|---|---|
| 1 人 | 2–3 页 | 单人项目,重点写清链路与一点自动探索 |
| 2 人 | 4–5 页 | 两人分工要写清楚 |
| 3 人 | 6 页左右 | 机器狗项目,三块分工分别成节 |
| 4 人及以上 | 8 页左右 | 每多 1 人约 +2 页 |
报告书建议结构(按节写):
- 封面(不计入页数):题目、方向(A/B)、组员姓名学号、分工一句话
- 项目概述(约 0.5 页):做了什么、选了哪个方向、为什么
- 系统链路(约 1 页):手机 → Tailscale → 桥接程序 → 机器人 的图与说明
- 迷宫设计(约 1 页):迷宫长什么样、改了
maze.py/OBSTACLES的哪些参数,配截图 - 代码改动说明(约 1–2 页):你们改 / 写了哪几个文件、关键函数贴一小段代码并解释
- 自动探索策略(约 1 页,进阶):用了什么算法、效果如何
- 问题与解决(约 0.5–1 页):踩过的坑、怎么解决的
- 成果与分工(约 0.5 页):到达终点截图 / 视频链接 + 每位组员具体负责了什么
三人及以上的机器狗组,建议在“分工”里明确:①网络与网页 ②迷宫与碰撞 ③自动探索算法(人多再加④报告与测试),并在第 5 节里各写各自负责的代码。
14.10 项目交付与评分
14.10.1 交付物
每组提交:
- 代码:改造后的
server.py/turtlesim_web_bridge.py、maze.py、explorer.py+ 你的index.html - 演示视频:手机遥控机器人/乌龟从起点探索到终点的完整过程(建议 1–2 分钟)
- 报告书:按 14.9 节的人数 / 页数与结构撰写(A4 PDF)
- 分工说明:每位组员负责了哪一部分(也写进报告书第 8 节)
14.10.2 评分维度(参考)
| 维度 | 占比 | 说明 |
|---|---|---|
| 链路打通 | 30% | 手机 → Tailscale → 桥接程序 → 机器人,四个动作都能控制 |
| 迷宫探索 | 25% | 能在迷宫中完成基本探索 / 到达终点 |
| 进阶功能 | 25% | 自动探索、碰撞处理、路径记录等 |
| 工程规范 | 10% | 单一常驻程序结构清晰、网页可用 |
| 报告与展示 | 10% | 视频清晰、分工明确、问题分析到位 |
14.11 常见问题(FAQ)
| 现象 | 可能原因 | 处理 |
|---|---|---|
| 手机打不开网页 | 没在同一个 Tailnet / IP 用错 | tailscale ip -4 确认地址,手机也要登录同一账号 |
| 网页显示“连接断开” | 桥接程序没运行 / 关掉了 | 重新运行 server.py 或 turtlesim_web_bridge.py 并保持常驻 |
| 乌龟一直走停不下来 | 松手没有发 stop |
检查 touchend 是否绑定了停止命令 |
| 方向 B 乌龟不动 | turtlesim_node 没开 / 没 source ROS2 | 先开 turtlesim_node,每个终端都要 source /opt/ros/humble/setup.bash |
| 方向 A 机器狗加载失败 | pybullet_data 里没有 laikago | 更新 pybullet,确认 requirements.txt 已安装 |
14.12 本周小结
- 本周把“网页 + 局域网 + 仿真 + 机器人”串成一条完整的手机遥控链路。
- 核心工程原则:接收网络 + 控制机器人写在同一个常驻程序里,手机网页只发命令。
- 方向 A(PyBullet 机器狗)和方向 B(turtlesim 乌龟)任选其一,统一要求是手机能控制前进/后退/左转/右转,并在迷宫中完成探索。
- 起始代码已经准备好,跑通之后重点放在:迷宫地图、自动探索、碰撞处理、路径记录与展示。
把它当成一个“最小可玩的机器人远程操控系统”:当你能用自己的手机在迷宫里把机器人开起来,你就已经把这门课的网络、环境、仿真、控制全部打通了。