Week 8:Docker 安装与 ROS2 桌面容器
本周使用 Docker 运行 ROS2 桌面环境。目标是减少本机环境差异,让大家可以通过浏览器访问带图形界面的 ROS2 环境。
课堂内容
- Windows 安装 Docker。
- Mac 安装 Docker。
- 使用 Docker 运行 ROS2。
Windows 安装 Docker
下载安装包:
https://docs.docker.com/desktop/setup/install/windows-install/
课堂提醒:
- 下载后可以把安装包重命名为没有空格的文件名。
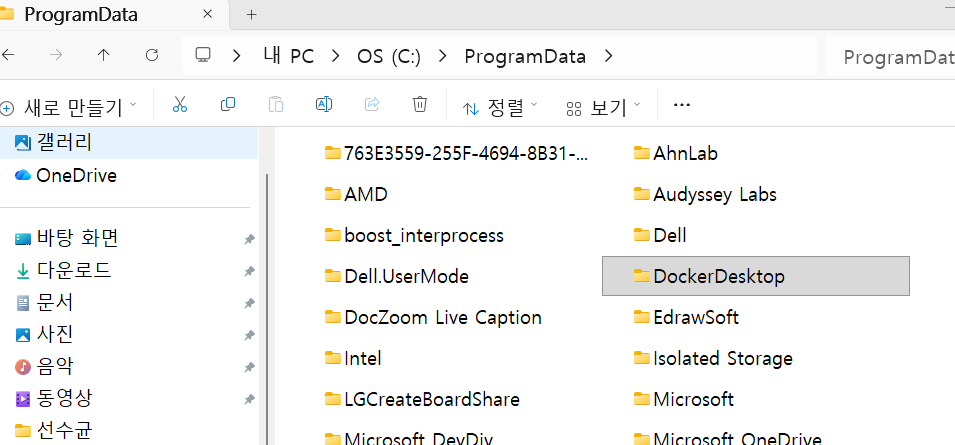
- 如果安装异常,可以显示隐藏文件,找到
ProgramData目录,删除DockerDesktop文件夹后重试。
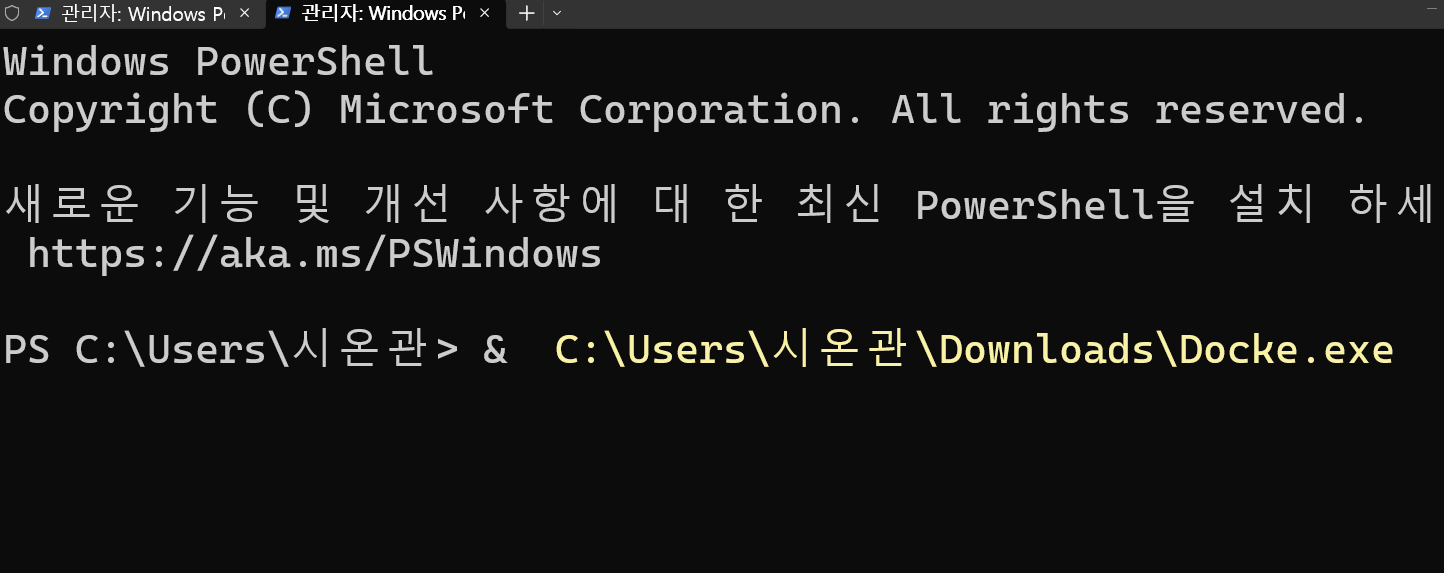
用管理员权限打开 PowerShell,命令行中输入 &,然后复制粘贴安装包路径执行。
示意:
& C:\path\to\DockerDesktopInstaller.exe
Mac 安装 Docker
如果已经安装 Homebrew:
brew install --cask docker
如果没有 Homebrew,可以先安装 Homebrew:
/bin/bash -c "$(curl -fsSL https://raw.githubusercontent.com/Homebrew/install/HEAD/install.sh)"
Docker 运行 ROS2 桌面
课堂使用参考项目:
https://github.com/Tiryoh/docker-ros2-desktop-vnc
打开项目页面,复制 Quick Start 下的第一行命令运行。
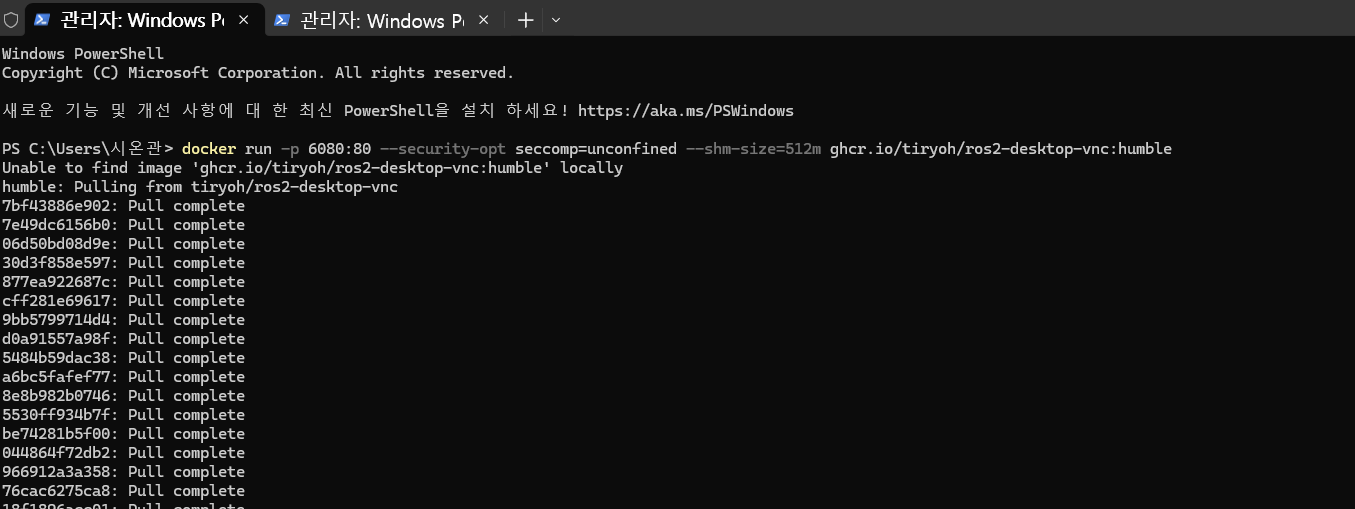
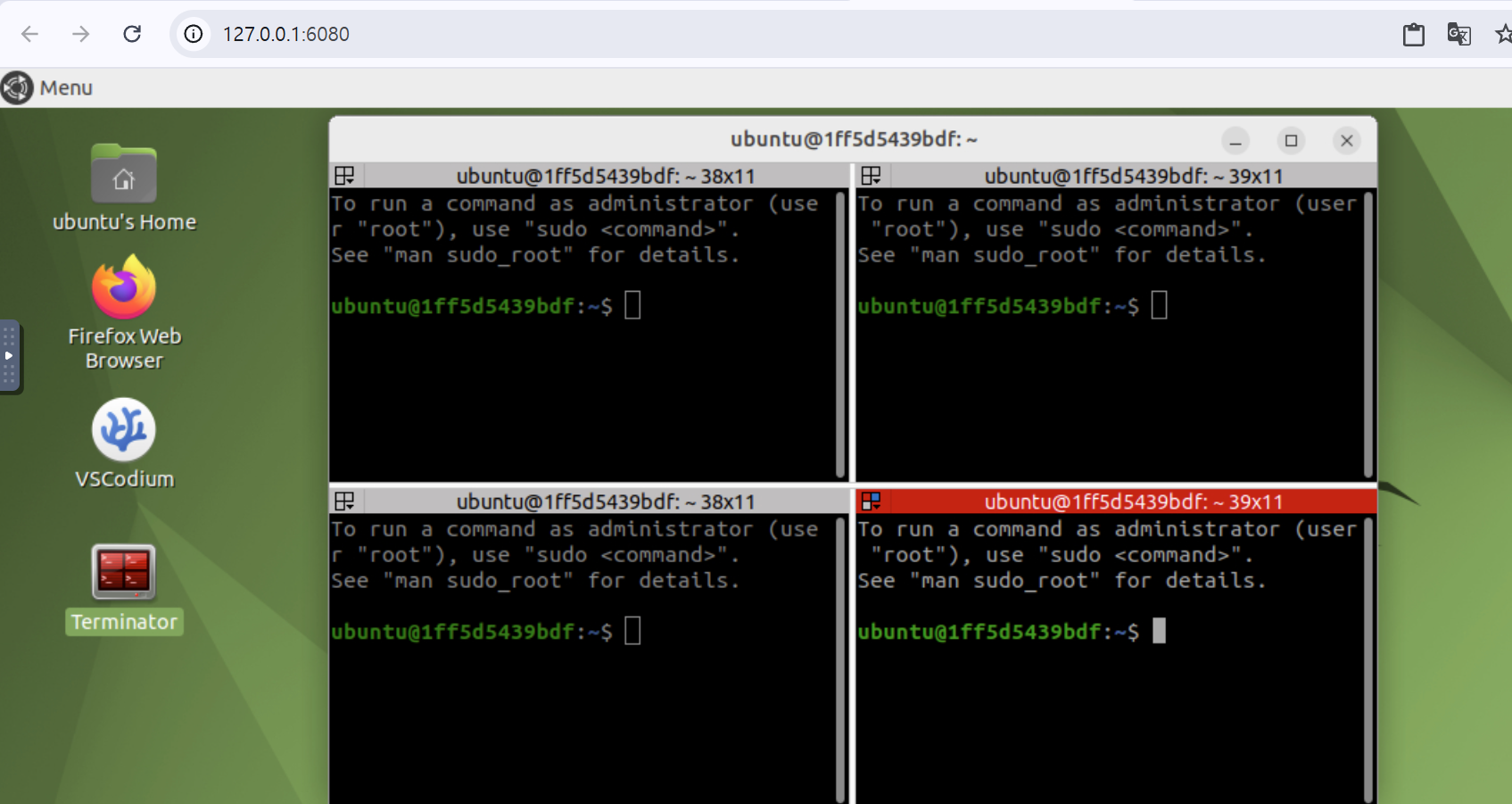
运行成功后,在浏览器中打开:
http://127.0.0.1:6080/
这个页面会显示 Docker 容器中的 ROS2 图形桌面环境。
运行 turtlesim
在 Docker 镜像中 ROS2 已经安装好,可以继续运行小乌龟节点:
ros2 run turtlesim turtlesim_node
另开终端启动键盘控制:
ros2 run turtlesim turtle_teleop_key
为什么使用 Docker
Docker 可以把复杂环境封装到容器里:
- 减少不同电脑、不同系统带来的安装差异。
- 避免本机环境被反复修改。
- 便于复现课堂实验。
- 适合 ROS2、仿真、服务器部署等场景。
常见问题
- Windows 上 Docker Desktop 通常依赖 WSL2,请先确认 WSL 可以正常使用。
- 第一次运行镜像需要下载大量文件,速度取决于网络。
- 浏览器地址是本机回环地址
127.0.0.1,只代表访问自己电脑上的服务。