第9周:机器人与机器视觉数学基础(网课)
课时: 3小时(线上录播课程)
💡 说明: 本周为网课,着重讲解机器人学和机器视觉的数学基础知识,为后续实战课程打下理论基础。
🎬 配套资料:讲解 PPT 与配音视频
本周配套了一份 68 页教学级讲解 PPT,逐节展开四大模块的公式推导、代码实现与动画图示,配合下方完整讲义即可作为一节自学网课。
- 📊 讲解 PPT:
week9_project/week9_数学基础讲解.pptx(68 页,16:9,含公式推导 / 代码 / 配图) - 📝 配音脚本:
week9_project/narration_script.md(68 页逐页讲解词,全程约 50–60 分钟) - 🎬 讲解视频:配音由 voicebox 的 Chatterbox 多语种引擎、以授课老师本人录音克隆生成。内容较多,已按小节拆成 7 段,可按需逐节观看;另附独立书目导读视频(见下文「参考书目推荐」)。
📚 参考书目推荐(独立视频)
本周数学内容较深,建议配合参考书往下挖。下面这段独立书目导读视频介绍 6 本常用教材,并重点推荐两本:
- 《现代机器人学:机构、规划与控制》 — 李群、李代数、螺旋理论讲得极好,首尔大学本科生机器人课就用这本,适合深入学习本周模块 1–2;
- 《控制之美》 — 哔哩哔哩 UP 主 DR CAN(王天威)所著,控制理论讲得直观好懂,适合补齐控制直觉。
书目导读视频(约 5 分钟)。脚本见 week9_project/books_narration_script.md,幻灯片见 images/course-ppt/week9_books/。
| 书目 | 侧重 | 与本周关系 |
|---|---|---|
| 现代机器人学 ★ | 运动/控制/李代数 | 模块 1–2 深入教材 |
| 控制之美 ★ | 控制理论(UP 主 DR CAN) | 模块 2 控制直觉 |
| 概率机器人 | 定位 / SLAM / 不确定性 | 模块 3–4 延伸 |
| 机器人学·机器视觉与控制(Corke) | MATLAB 算法与视觉 | 模块 2–3 工程实现 |
| ROS 2 机器人编程 | ROS2 实战 | 后续项目周 |
| Python 编程:从入门到实践 | 编程基础 | 全课程前提 |
PPT 部分页面预览(封面 / 知识地图 / 李代数指数映射推导 / 标准链路 / 雅可比 / A* 对比):

📋 本周课程大纲
| 模块 | 时长 | 主题 | 内容 |
|---|---|---|---|
| 模块1 | 90分钟 | 线性代数基础 + 具身智能数学基石 | 向量、矩阵、坐标变换、李群 SO(3)/SE(3)、李代数 so(3)/se(3)、四元数 |
| 模块2 | 30分钟 | 机器人运动学数学 | 正逆运动学、雅可比矩阵 |
| 模块3 | 30分钟 | 计算机视觉数学 | 图像表示、卷积、特征提取 |
| 模块4 | 30分钟 | 路径规划算法 | BFS / Dijkstra / A* / RRT / DWA |
| 作业 | 30分钟 | 习题练习 | 数学推导与编程验证 |
⏱️ 模块 1 是本周的核心重点,因为李群/李代数是后续 SLAM、运动规划、强化学习、VLA 大模型动作微调的共同数学基础。建议反复观看。
模块1:线性代数基础(50分钟)
1.1 为什么机器人需要数学?
机器人的本质是数学模型:
物理世界 数学世界 控制指令
↓ ↓ ↓
┌────────┐ ┌────────┐ ┌────────┐
│ 机械臂 │ 建模→ │ 数学方程│ 求解→ │ 电机角度│
│ 位置 │ │ 矩阵运算│ │ 速度 │
└────────┘ └────────┘ └────────┘
核心数学工具:
- 线性代数:描述位置、姿态、变换
- 微积分:描述速度、加速度、优化
- 概率统计:处理传感器噪声、不确定性
1.2 向量与坐标系
1.2.1 向量表示
三维空间中的点可以用向量表示:
z
↑
| • P(x, y, z)
| /
| /
| /
|/________→ y
/
/
↓
x
向量表示:p = [x]
[y]
[z]
Python实现:
import numpy as np
# 定义三维空间中的点
p = np.array([1.0, 2.0, 3.0])
print(f"点P: {p}")
# 向量的长度(模)
length = np.linalg.norm(p)
print(f"向量长度: {length:.2f}") # √(1²+2²+3²) = √14 ≈ 3.74
# 单位向量(方向)
unit_vector = p / length
print(f"单位向量: {unit_vector}")
1.2.2 向量运算
| 运算 | 数学表示 | 物理意义 | Python |
|---|---|---|---|
| 加法 | a + b | 位移叠加 | a + b |
| 减法 | a - b | 相对位置 | a - b |
| 点积 | a·b | 投影、夹角 | np.dot(a, b) |
| 叉积 | a×b | 法向量、力矩 | np.cross(a, b) |
向量加法的平行四边形法则 & 点积的投影几何意义
# 向量运算示例
a = np.array([1, 0, 0]) # x轴方向
b = np.array([0, 1, 0]) # y轴方向
# 点积:a·b = |a||b|cosθ
dot_product = np.dot(a, b)
print(f"点积: {dot_product}") # 0 (垂直)
# 叉积:a×b,结果垂直于a和b
cross_product = np.cross(a, b)
print(f"叉积: {cross_product}") # [0, 0, 1] (z轴方向)
1.3 矩阵与坐标变换
1.3.1 旋转矩阵
二维旋转:
y y'
↑ ↗
| /
| θ /
|___→ x /____→ x'
绕z轴旋转θ角:
R(θ) = [cos(θ) -sin(θ)]
[sin(θ) cos(θ)]
2D 旋转矩阵 R(θ) 作用于一个 L 形物体:每个点都被 R 乘一次,整体绕原点旋转。
右侧矩阵数值随 θ 实时更新——这就是李群 SO(2) 的"一个元素"。
import numpy as np
import matplotlib.pyplot as plt
def rotation_matrix_2d(theta):
"""2D旋转矩阵"""
return np.array([
[np.cos(theta), -np.sin(theta)],
[np.sin(theta), np.cos(theta)]
])
# 旋转一个点
p = np.array([1, 0]) # x轴上的点
theta = np.pi / 4 # 旋转45度
R = rotation_matrix_2d(theta)
p_rotated = R @ p # 矩阵乘法
print(f"原点: {p}")
print(f"旋转后: {p_rotated}") # [0.707, 0.707]
# 可视化
plt.figure(figsize=(6, 6))
plt.arrow(0, 0, p[0], p[1], color='blue', width=0.02, label='原始')
plt.arrow(0, 0, p_rotated[0], p_rotated[1], color='red', width=0.02, label='旋转45°')
plt.xlim(-0.5, 1.5)
plt.ylim(-0.5, 1.5)
plt.grid(True)
plt.legend()
plt.axis('equal')
plt.title('2D旋转变换')
plt.show()
1.3.2 齐次变换矩阵
同时表示旋转和平移
齐次变换矩阵(4×4):
T = [R t] R: 3×3旋转矩阵
[0 1] t: 3×1平移向量
应用:p' = T * p
齐次变换 T 把"旋转 + 平移"压成一个 4×4 矩阵:
变换的合成 = 矩阵的乘法,TAB·TBC = TAC。
def homogeneous_transform(rotation, translation):
"""
构建齐次变换矩阵
rotation: 3x3旋转矩阵
translation: 3x1平移向量
"""
T = np.eye(4)
T[:3, :3] = rotation
T[:3, 3] = translation
return T
# 示例:旋转90度并平移(1,2,3)
R = np.array([
[0, -1, 0],
[1, 0, 0],
[0, 0, 1]
])
t = np.array([1, 2, 3])
T = homogeneous_transform(R, t)
print("齐次变换矩阵:")
print(T)
# 应用变换
p = np.array([1, 0, 0, 1]) # 齐次坐标
p_transformed = T @ p
print(f"变换后: {p_transformed[:3]}") # [1, 3, 3]
1.4 进阶:李群、李代数与四元数(具身智能基础)
📖 本节主要参考:彻底搞懂具身智能必备知识:李群、李代数、四元数(深蓝具身智能专栏)
🎯 学习目标:理解为什么 SLAM、运动规划、强化学习、模型预测控制(MPC)、人形机器人全身控制(WBC)都离不开李群/李代数/四元数这套数学体系;能在 Python 中完成三者的相互转换,并知道在工程里何时该用哪一个。
⏱️ 建议学习时长:90 分钟(本节内容较多,可分两次学习)
1.4.0 前言:为什么具身智能要"重温这些老派的东西"
十年前我们学机器人时,旋转变换可以用欧拉角顶一顶,实在不行上旋转矩阵;SLAM 里用四元数做状态变量,微分时小心翼翼加个扰动——用各种 hack 和补丁,一切似乎都过得去。
后来,业内开始将深度学习与物理运动深度耦合,问题就集中爆发了:
传统 SLAM / 轨迹优化时代:
几何操作藏在优化器内部 → 工程师不用直接面对旋转空间结构
深度学习 + 具身智能时代:
几何操作暴露到网络的前向/反向传播中
↓
必须保证:
1. 网络输出的动作 → 在物理上合法(不能出现"扭曲旋转")
2. 大范围姿态优化 → 可微、无奇异点
3. 生成的运动轨迹 → 严格物理可行
↓
绕路走不通了,必须直面旋转空间的真正结构 = 李群
💡 第一性原理:旋转不构成向量空间(不能直接相加),但构成一个光滑流形 + 群——这就是李群。要在上面做"梯度下降",必须借助它的切空间(李代数)。
1.4.1 欧拉角的致命缺陷:万向锁
A. 三种姿态表示方法对比
传统姿态表示的三种方式:
欧拉角 (roll, pitch, yaw) → 直观,但有万向锁 ❌、不便插值
旋转矩阵 R (3×3) → 精确,但 9 个数冗余、6 个约束
四元数 q (4 个数) → 紧凑、无万向锁、插值顺滑 ✅
轴角 (axis-angle) → 几何意义清晰,等价于 so(3) 向量
B. 万向锁(Gimbal Lock)的本质
误区:很多人以为欧拉角的三个轴始终两两正交,其实不是。
欧拉角 ZYX 顺序(航空惯例 yaw-pitch-roll):
先绕 Z 轴转 ψ(偏航 yaw) → 此时新的 Y 轴变了
再绕新的 Y 轴转 θ(俯仰 pitch) → 此时新的 X 轴又变了
最后绕新的 X 轴转 φ(滚转 roll)
每一步的旋转轴都依赖前一步的姿态,并不固定!
当 θ = ±90° 时发生什么?
若 pitch θ = 90°:
第一次旋转把原 X 轴转到了 -Z 方向
此时 yaw(绕 Z)和 roll(绕新 X)的旋转轴重合
↓
失去 1 个自由度(3 DOF 退化为 2 DOF)
物理表现:
• 相机/机器人头部"卡住",某些朝向无法到达
• 控制系统从一个解跳到另一个解,姿态突变
• 自动驾驶车避让障碍物时,车头方向无法平滑调整
C. 万向锁的几何直观
万向锁实时演示:三个旋转环(红=外环 Z,绿=中环 Y',蓝=内环 X'')随欧拉角变化。
当 pitch 转到 90° 时,红绿环旋转轴对齐 → 丢失 1 个自由度(右侧状态卡变红)。
📌 工程结论:欧拉角只用于显示和人机交互(用户友好),绝不用于状态变量和优化。所有内部计算用四元数 + 李代数。
1.4.2 李群 SO(3):纯旋转的集合
A. 数学定义
SO(3)(Special Orthogonal Group 3)= 三维空间中所有"合法纯旋转"的集合:
SO(3) = { R ∈ ℝ^(3×3) | RᵀR = I 且 det(R) = +1 }
这两个约束分别对应"形状保持"和"右手旋转"两个物理要求。
B. 约束公式的完整推导
(1) 正交性约束 RᵀR = I 的推导:
出发点:旋转是线性变换,对任意向量 v ∈ ℝ³,旋转后 v' = R · v
物理要求:旋转不改变向量长度
→ |v'|² = |v|²
把模长展开:
|v'|² = (Rv)ᵀ(Rv) = vᵀRᵀRv
|v|² = vᵀv
二者相等对任意 v 成立:
vᵀ(RᵀR - I)v = 0 ∀v
↓
RᵀR = I ✅ 正交性约束
(2) 行列式约束 det(R) = +1 的推导:
对正交矩阵 RᵀR = I 两边取行列式:
det(RᵀR) = det(I)
det(R)·det(Rᵀ) = 1
det(R)² = 1
→ det(R) = ±1
物理排除:
det(R) = -1 → 对应镜像反射(如把右手变成左手)
这不是真实物理世界的旋转
det(R) = +1 → 右手旋转,符合"右手定则" ✅
C. SO(3) 的群结构
SO(3) 之所以叫"群",是因为它满足以下运算性质:
| 性质 | 数学表达 | 物理意义 |
|---|---|---|
| 封闭性 | R₁ · R₂ ∈ SO(3) | 两次旋转合成还是旋转 |
| 结合律 | (R₁R₂)R₃ = R₁(R₂R₃) | 旋转可分组进行 |
| 单位元 | I · R = R · I = R | "不转" 也是一个旋转 |
| 逆元 | R · Rᵀ = I → R⁻¹ = Rᵀ | 任何旋转都可逆 |
重要工程公式:旋转矩阵的逆等于其转置——这是 SLAM 里频繁使用的性质,避免了昂贵的矩阵求逆。
D. 姿态叠加(坐标变换链)
A 相对于 C 的旋转 = A 相对于 B 的旋转 × B 相对于 C 的旋转
R_AC = R_AB × R_BC
例如:相机相对于世界的姿态 = 相机相对于机器人 × 机器人相对于世界。
E. SO(3) 的"维度"
虽然旋转矩阵有 9 个元素,但实际只有 3 个自由度:
- 9 个元素 - 6 个约束(RᵀR=I 给出 6 个独立方程,因为对称矩阵)= 3 个自由度
- 这与"绕一个轴转一个角度"的轴角表示自由度一致
🧠 关键认知:SO(3) 是 9 维空间 ℝ⁹ 中的一个 3 维光滑流形(manifold)。它不是平的,更不是一个普通的向量空间——这就是为什么不能直接对旋转做加法/梯度下降。
1.4.3 李群 SE(3):刚体运动(旋转 + 平移)
A. 数学定义
SE(3)(Special Euclidean Group 3)= 三维空间中所有刚体运动的集合:
SE(3) = { T = [R t] | R ∈ SO(3), t ∈ ℝ³ }
[0 1]
T 是 4×4 的齐次变换矩阵(就是 §1.3.2 的 T)。
B. 齐次变换矩阵的完整推导
(1) 原始关系式(非齐次):
空间中点 p ∈ ℝ³,经旋转 R + 平移 t 后:
p' = R · p + t
问题:这不是矩阵乘法,无法直接叠加多个变换!
(2) 齐次化改造:
引入齐次坐标,把 3 维向量 p = [x,y,z]ᵀ 扩展为 4 维 p̃ = [x,y,z,1]ᵀ:
p̃' = T · p̃
[ x' ] [ R t ] [ x ] [ Rp + t ]
[ y' ] = [ ] [ y ] = [ ]
[ z' ] [ 0 1 ] [ z ] [ 1 ]
[ 1 ] [ 1 ]
✅ 与原始 p' = Rp + t 等价,且现在是纯粹的矩阵乘法。
(3) 变换的合成(齐次形式的好处):
T_AB · T_BC = [R_AB t_AB] [R_BC t_BC]
[ 0 1 ] [ 0 1 ]
= [R_AB·R_BC R_AB·t_BC + t_AB]
[ 0 1 ]
= T_AC ✅
C. SE(3) 的逆
T = [R t] → T⁻¹ = [Rᵀ -Rᵀt]
[0 1] [0 1 ]
推导:
要求 T · T⁻¹ = I,设 T⁻¹ = [A b]:
[R t][A b] [RA Rb+t] [I 0]
[0 1][0 1] = [0 1 ] = [0 1]
由 RA = I → A = R⁻¹ = Rᵀ
由 Rb + t = 0 → b = -Rᵀ·t ✅
D. SE(3) 的"维度"
- 6 自由度:3 个旋转 + 3 个平移
- 是 16 维空间 ℝ^(4×4) 中的一个 6 维光滑流形
E. 工程中 SE(3) 的应用
| 场景 | SE(3) 表示 |
|---|---|
| 机械臂末端位姿 | 末端相对于基座的 T |
| 相机外参(SLAM) | 相机相对于世界的 T_wc |
| 无人机状态 | 机体相对于地面的 T |
| 关键帧位姿图 | 每个关键帧一个 T 节点 |
| 物体抓取目标 | 物体相对于相机的 T_co |
1.4.4 李代数 so(3):旋转的切空间
A. 直观比喻:球面与地图
李群 SO(3)/SE(3) ≈ 弯曲的球面(地球表面)
• 不能直接相加:北京坐标 + 纽约坐标 = ???
• 不能直接求导:维度沿球面变化
李代数 so(3)/se(3) ≈ 平面地图(局部展开)
• 可以加减:地图上两点矢量加法
• 可以求导:梯度有意义
• 通过"映射"和球面建立对应
B. so(3) 的数学定义
so(3) = SO(3) 在单位元 I 处的切空间,是 3 维向量空间。
具体来说,是所有 3×3 反对称矩阵的集合(与 3 维向量 ω 一一对应):
so(3) = { [ω]× ∈ ℝ^(3×3) | [ω]×ᵀ = -[ω]× }
向量 ω = (ωₓ, ωᵧ, ωᵤ)ᵀ 的"反对称化"(hat 算子):
[ 0 -ωᵤ ωᵧ ]
[ω]× = ω∧ = [ ωᵤ 0 -ωₓ ]
[-ωᵧ ωₓ 0 ]
C. so(3) 定义的推导(从 SO(3) 怎么"切"出来的?)
出发点:旋转矩阵 R(t) 是时间的函数(旋转在运动)
约束: R(t)·R(t)ᵀ = I 对所有 t 成立
两边对 t 求导:
Ṙ(t)·R(t)ᵀ + R(t)·Ṙ(t)ᵀ = 0
↓
Ṙ·Rᵀ = -(Ṙ·Rᵀ)ᵀ ← 反对称!
↓
令 S = Ṙ·Rᵀ
S 是反对称矩阵 → 可写成 [ω]× 形式
↓
Ṙ = S · R = [ω]× · R
物理含义:
ω = (ωₓ, ωᵧ, ωᵤ) 是"瞬时角速度"
在单位元处(R = I):Ṙ = [ω]×
✅ 所以 so(3) 描述的就是单位元处的"旋转速度方向",即旋转的"微小增量"。
D. 反对称矩阵的重要性质
1. [ω]× · v = ω × v (叉乘的矩阵形式!)
2. [ω]×ᵀ = -[ω]× (反对称)
3. [ω]ײ = ωωᵀ - |ω|²·I (三角恒等式)
4. [ω]׳ = -|ω|² · [ω]× (递推关系:循环!)
性质 4 非常关键——它让指数映射的泰勒级数能"收敛成闭式解"(Rodrigues 公式)。
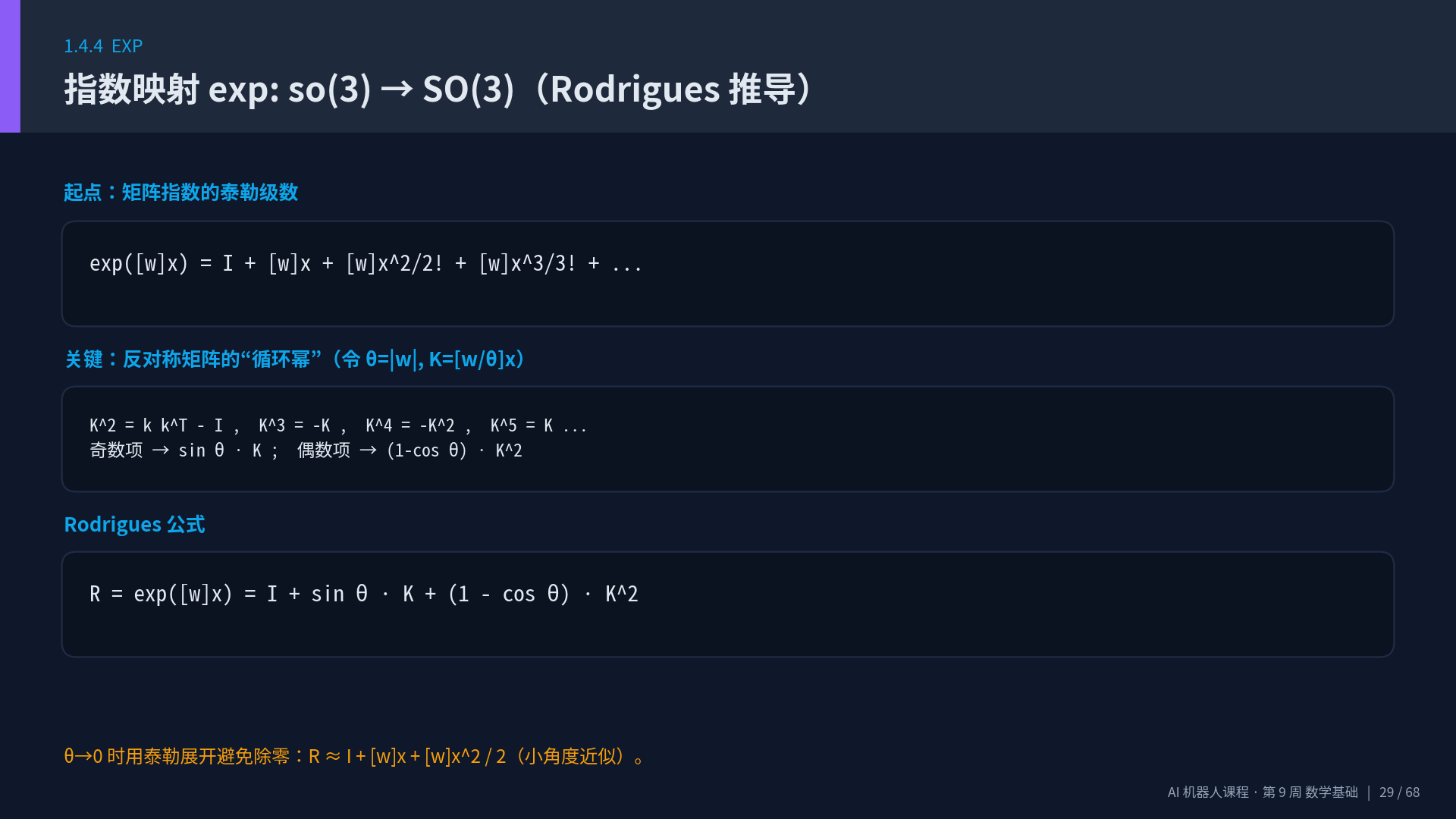
E. 指数映射 exp: so(3) → SO(3)(Rodrigues 公式推导)
目标:把 so(3) 向量 ω 转换为 SO(3) 旋转矩阵 R。
起点:矩阵指数的定义
exp([ω]×) = I + [ω]× + [ω]ײ/2! + [ω]׳/3! + [ω]×⁴/4! + ...
关键技巧:利用反对称矩阵的循环幂
设 θ = |ω|(旋转角度),k = ω/θ(单位旋转轴),则 K = [k]× 满足:
K² = kkᵀ - I
K³ = -K
K⁴ = -K²
K⁵ = K
...
代入泰勒级数并分类:
exp(θK) = I + θK + (θK)²/2! + (θK)³/3! + (θK)⁴/4! + ...
奇数项(含 K, -K, K, -K, ...):
= K·(θ - θ³/3! + θ⁵/5! - ...) = sin(θ) · K
偶数项(含 K², -K², K², ...):
= K²·(θ²/2! - θ⁴/4! + ...) = (1 - cos(θ)) · K²
加上常数 I:
最终得到 Rodrigues 公式:
┌────────────────────────────────────────────────────┐
│ R = exp([ω]×) = I + sin(θ)·K + (1 - cos(θ))·K² │
│ │
│ 其中 θ = |ω|, k = ω/θ, K = [k]× │
└────────────────────────────────────────────────────┘
或等价写法:
R = I + (sin θ / θ)·[ω]× + ((1 - cos θ) / θ²)·[ω]ײ
Rodrigues 公式实时演示:so(3) 向量 ω 绕固定轴增大角度 θ,
左侧立方体被 R = exp([ω]×) 连续旋转,右侧实时显示 ω、θ 与旋转矩阵 R 的所有元素。
特殊情形(θ → 0)的处理(数值稳定性):
当 θ ≈ 0 时,用泰勒展开避免除零:
sin(θ)/θ ≈ 1 - θ²/6 + θ⁴/120 - ...
(1-cos θ)/θ² ≈ 1/2 - θ²/24 + θ⁴/720 - ...
→ R ≈ I + [ω]× + [ω]ײ/2 (小角度近似)
F. 对数映射 log: SO(3) → so(3)
目标:从旋转矩阵 R 反求旋转向量 ω("姿态差→可优化向量")。
步骤:
1. 求旋转角度 θ:
trace(R) = 1 + 2cos(θ)
→ θ = arccos((trace(R) - 1) / 2)
2. 求旋转轴 k:
R - Rᵀ = 2 sin(θ) · [k]×
→ 从反对称矩阵 [k]× 中读出 k 向量:
k = (1 / (2 sin θ)) · [R₃₂ - R₂₃, R₁₃ - R₃₁, R₂₁ - R₁₂]ᵀ
3. 合成:
ω = θ · k
特殊情形:
θ = 0 → ω = 0(无旋转)
θ = π → 需特别处理(k 通过 R + I 的对角线求出)
G. Python 完整实现与验证
import numpy as np
from scipy.spatial.transform import Rotation
def skew(omega):
"""向量 → 反对称矩阵(hat 算子)"""
wx, wy, wz = omega
return np.array([
[ 0, -wz, wy],
[ wz, 0, -wx],
[-wy, wx, 0]
])
def vee(S):
"""反对称矩阵 → 向量(vee 算子,hat 的逆运算)"""
return np.array([S[2, 1], S[0, 2], S[1, 0]])
def exp_so3(omega):
"""指数映射:so(3) → SO(3),即 Rodrigues 公式"""
theta = np.linalg.norm(omega)
if theta < 1e-10:
return np.eye(3) + skew(omega) # 小角度近似
K = skew(omega / theta)
return np.eye(3) + np.sin(theta) * K + (1 - np.cos(theta)) * (K @ K)
def log_so3(R):
"""对数映射:SO(3) → so(3)"""
cos_theta = (np.trace(R) - 1) / 2
cos_theta = np.clip(cos_theta, -1.0, 1.0)
theta = np.arccos(cos_theta)
if theta < 1e-10:
return vee(R - np.eye(3)) # 小角度
return (theta / (2 * np.sin(theta))) * vee(R - R.T)
# ===== 测试:双向往返一致性 =====
omega = np.array([0.3, -0.5, 1.2]) # 任意旋转向量
R = exp_so3(omega) # so(3) → SO(3)
omega_back = log_so3(R) # SO(3) → so(3)
print("原始 ω: ", omega.round(6))
print("往返后 ω: ", omega_back.round(6))
print("一致性误差: ", np.linalg.norm(omega - omega_back))
print("正交性 RᵀR-I: ", np.linalg.norm(R.T @ R - np.eye(3)))
print("行列式 det(R): ", np.linalg.det(R).round(6))
# ===== 与 scipy 交叉验证 =====
R_scipy = Rotation.from_rotvec(omega).as_matrix()
print("与 scipy 一致: ", np.allclose(R, R_scipy))
1.4.5 李代数 se(3):刚体运动的切空间
A. se(3) 定义
se(3) = SE(3) 在单位元处的切空间,是 6 维向量空间:
se(3) 向量:ξ = [ρ; ω] ∈ ℝ⁶
ρ ∈ ℝ³ —— 平移增量
ω ∈ ℝ³ —— 旋转增量
广义反对称化:
[ [ω]× ρ ] 4×4 矩阵
ξ∧ = [ 0ᵀ 0 ]
B. se(3) 定义的推导
类比 so(3) 推导:
SE(3) 中 T(t) 满足 T·T⁻¹ = I
两边对 t 求导:
Ṫ·T⁻¹ + T·(T⁻¹). = 0
→ Ṫ·T⁻¹ 是 4×4 广义反对称矩阵
形式上:
Ṫ·T⁻¹ = [Ṙ·Rᵀ ṫ - Ṙ·Rᵀ·t]
[ 0 0 ]
第一块就是 [ω]×(so(3) 的形式);
第二块定义为平移速度 ρ(其实是修正后的瞬时线速度)。
→ se(3) 自然分解为 (旋转, 平移) = (ω, ρ)
C. 指数映射 exp: se(3) → SE(3)
┌ ┐
exp(ξ∧) = │ exp([ω]×) V·ρ │
│ 0 1 │
└ ┘
其中:
exp([ω]×) = Rodrigues 公式(与 so(3) 相同)
V 称为"左雅可比矩阵"(补偿旋转对平移的影响):
V = I + ((1 - cos θ) / θ²)·[ω]× + ((θ - sin θ) / θ³)·[ω]ײ
🧠 理解 V 的物理意义:如果直接令 t = ρ,则在旋转的同时做平移会"漂移"——V 矩阵正是补偿这个漂移,确保积分结果落在真正的 SE(3) 上。
D. Python 实现 SE(3) 指数映射
def left_jacobian_so3(omega):
"""SE(3) 指数映射中的左雅可比矩阵 V"""
theta = np.linalg.norm(omega)
if theta < 1e-10:
return np.eye(3) + 0.5 * skew(omega)
K = skew(omega / theta)
V = (np.eye(3)
+ ((1 - np.cos(theta)) / theta) * K
+ ((theta - np.sin(theta)) / theta) * (K @ K))
return V
def exp_se3(xi):
"""指数映射:se(3) → SE(3)
xi = [rho_x, rho_y, rho_z, w_x, w_y, w_z] (前 3 平移,后 3 旋转)
"""
rho = xi[:3]
omega = xi[3:]
R = exp_so3(omega)
V = left_jacobian_so3(omega)
t = V @ rho
T = np.eye(4)
T[:3, :3] = R
T[:3, 3] = t
return T
# 示例
xi = np.array([0.1, 0.2, 0.3, 0, 0, np.pi/4]) # 平移 + 绕 z 旋转 45°
T = exp_se3(xi)
print("SE(3) 矩阵:")
print(T.round(4))
1.4.6 四元数:SO(3) 的紧凑表达
A. 四元数定义
哈密尔顿四元数:
q = w + xi + yj + zk
= (w, x, y, z)
= (w, v⃗) ← w 是标量部分,v⃗=(x,y,z) 是矢量部分
虚部满足:
i² = j² = k² = ijk = -1
ij = k, ji = -k (不可交换!)
jk = i, kj = -i
ki = j, ik = -j
单位四元数约束:
|q|² = w² + x² + y² + z² = 1
只有单位四元数才表示合法旋转。
B. 四元数乘法(用于姿态叠加)
q₁ ⊗ q₂ = (w₁w₂ - v⃗₁·v⃗₂, w₁v⃗₂ + w₂v⃗₁ + v⃗₁ × v⃗₂)
物理含义:q₂ 之后再 q₁,等价于姿态先后叠加。
C. 四元数与轴角的对应
绕单位轴 k 转角度 θ:
q = (cos(θ/2), sin(θ/2)·k)
= (cos(θ/2), sin(θ/2)·kₓ, sin(θ/2)·kᵧ, sin(θ/2)·kᵤ)
📌 注意 θ/2:这是四元数的"双覆盖"特性——q 和 -q 表示同一个旋转。
D. 用四元数旋转向量
设向量 v⃗ ∈ ℝ³,纯虚四元数 p = (0, v⃗)
旋转后:p' = q ⊗ p ⊗ q*
q* = (w, -x, -y, -z) (共轭)
对单位四元数:q* = q⁻¹
最终:v⃗' = 旋转后向量 = p' 的虚部
E. 四元数 ↔ 旋转矩阵的等价证明
把 q = (w, x, y, z) 展开计算 q ⊗ p ⊗ q*,整理可得:
R(q) = ┌ ┐
│ 1-2(y²+z²) 2(xy - wz) 2(xz + wy) │
│ 2(xy + wz) 1-2(x²+z²) 2(yz - wx) │
│ 2(xz - wy) 2(yz + wx) 1-2(x²+y²) │
└ ┘
可以验证 R(q)ᵀR(q) = I 且 det(R(q)) = 1(利用 |q|²=1 约束),完美对应 SO(3)。
F. SLERP(球面线性插值)
两个姿态 q₀, q₁ 之间的平滑插值:
slerp(q₀, q₁, t) = sin((1-t)·Ω)/sin(Ω) · q₀ + sin(t·Ω)/sin(Ω) · q₁
其中 Ω = arccos(q₀ · q₁)(两个四元数的"夹角")
性质:
- 角速度恒定(不像欧拉角线性插值那样忽快忽慢)
- 路径最短(球面大圆弧)
- 适合相机切换、关键帧动画、姿态控制目标平滑
SLERP vs 欧拉角直接插值:相同起止姿态,左边四元数 SLERP 沿球面最短弧平滑过渡,
右边欧拉角逐分量线性相加却出现路径扭曲——这就是相机/关键帧动画都用 SLERP 的原因。
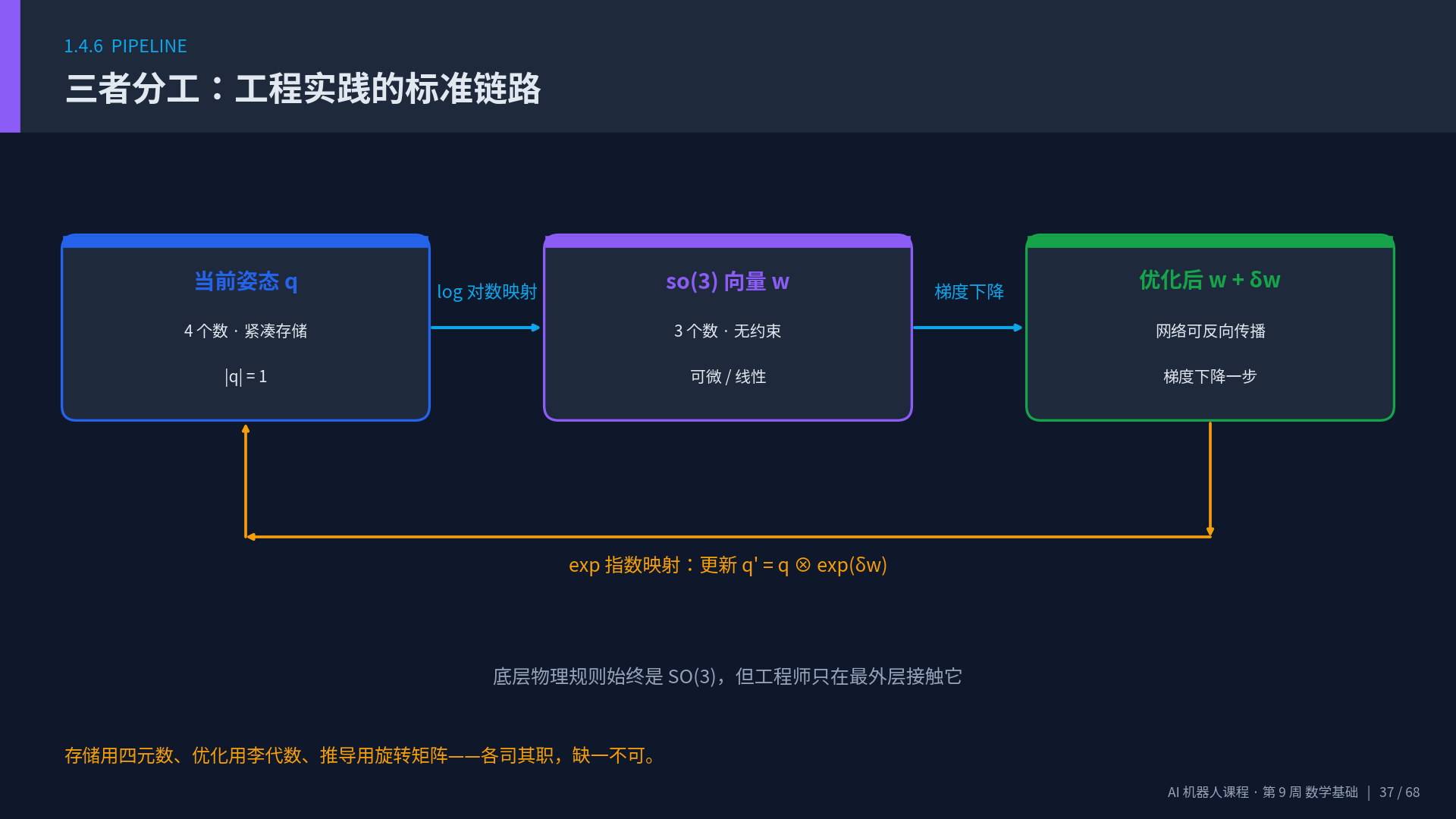
G. 三者分工:工程实践的"标准链路"
┌──────────────┐ 对数映射 log ┌───────────────┐ 梯度下降 ┌───────────────┐
│ 当前姿态 q │ ─────────────→ │ so(3) 向量 ω │ ────────→ │ 优化后 ω+δω │
│ (4 个数存储) │ │ (3 个数无约束) │ │ (网络反传可微) │
└──────────────┘ └───────────────┘ └───────────────┘
▲ │
│ 指数映射 exp │
└────────────────────────────────────────────────────────────┘
(更新姿态 q' = q ⊗ exp(δω))
底层物理规则始终是 SO(3)(RᵀR = I, det R = 1),但工程师只在最外层接触它。
H. Python 实战:四元数运算与 SLERP
from scipy.spatial.transform import Rotation, Slerp
import numpy as np
# ===== 1. 三种表示之间互相转换 =====
r = Rotation.from_euler('xyz', [30, 45, 60], degrees=True)
q = r.as_quat() # 四元数 [x, y, z, w] 注意 scipy 顺序!
R = r.as_matrix() # 旋转矩阵
omega = r.as_rotvec() # so(3) 向量(轴角,长度为 θ)
euler = r.as_euler('xyz', degrees=True)
print(f"四元数: {q.round(4)}")
print(f"so(3) 向量: {omega.round(4)} (长度 = {np.linalg.norm(omega):.4f})")
print(f"欧拉角: {euler.round(2)}°")
# ===== 2. 四元数乘法(姿态叠加)=====
q1 = Rotation.from_euler('z', 30, degrees=True)
q2 = Rotation.from_euler('x', 45, degrees=True)
q12 = q1 * q2 # 注意:是组合,不是数值乘法
print(f"组合后欧拉角: {q12.as_euler('xyz', degrees=True).round(2)}°")
# ===== 3. SLERP 球面线性插值 =====
key_times = [0, 1]
key_rots = Rotation.concatenate([
Rotation.from_euler('xyz', [0, 0, 0], degrees=True),
Rotation.from_euler('xyz', [90, 60, 30], degrees=True),
])
slerp = Slerp(key_times, key_rots)
print("\nSLERP 插值轨迹(t 从 0 → 1):")
for t in np.linspace(0, 1, 11):
r_mid = slerp(t)
angle = np.degrees(np.linalg.norm(r_mid.as_rotvec()))
print(f" t={t:.1f} → 总旋转角 = {angle:.2f}°")
# ===== 4. 验证 q 和 -q 表示同一个旋转 =====
q_pos = r.as_quat()
q_neg = -q_pos
R1 = Rotation.from_quat(q_pos).as_matrix()
R2 = Rotation.from_quat(q_neg).as_matrix()
print(f"\nq 和 -q 表示同一旋转? {np.allclose(R1, R2)}") # True
1.4.7 为什么深度学习时代必须用李代数?
A. 三种表示的"可微性"对比
┌──────────────┬──────────┬──────────────┬──────────────┐
│ 表示 │ 参数个数 │ 约束 │ 可直接梯度下降?│
├──────────────┼──────────┼──────────────┼──────────────┤
│ 旋转矩阵 R │ 9 │ RᵀR = I (6) │ ❌ │
│ 四元数 q │ 4 │ |q| = 1 │ ❌ │
│ so(3) 向量 ω │ 3 │ 无 │ ✅ │
│ 欧拉角 │ 3 │ 无 │ ⚠️ 万向锁 │
└──────────────┴──────────┴──────────────┴──────────────┘
为什么有约束的表示不能直接做梯度下降?
假设网络输出旋转矩阵 R̂:
loss(R̂) ← 计算损失
∂loss/∂R̂ ← 反传到 R̂
R̂ -= η · ∂loss/∂R̂ ← 普通梯度更新
问题:更新后的 R̂' 不再满足 R̂'ᵀR̂' = I!
→ 不是合法旋转 → 后续物理仿真崩溃
B. 李代数让"梯度下降在流形上正确进行"
正确做法("流形上的梯度下降"):
1. 网络输出 so(3) 增量 δω(3 个无约束的数)
2. 当前姿态 R 通过乘法更新:
R' = R · exp(δω∧)
↑
自动落在 SO(3) 上!
3. 损失函数对 δω 求导,反向传播
C. 经典应用:BA(Bundle Adjustment,捆绑调整)
SLAM 中典型问题:
• N 个相机位姿 T_i ∈ SE(3)
• M 个 3D 点 P_j ∈ ℝ³
• 观测:点 j 投影到相机 i 上的像素 u_ij
• 噪声:u_ij = π(T_i · P_j) + ε
目标:min Σ ‖u_ij - π(T_i · P_j)‖²
{T_i, P_j}
如果直接用旋转矩阵优化:
• 每次迭代要重投影到 SO(3)(QR 分解)
• 数值不稳定,迭代慢
用 se(3) 优化:
• 每个 T_i 用 6 维向量 ξ_i 表示扰动
• 用 GN/LM 算法在 se(3) 上线性化
• 最后 T_i ← exp(ξ_i∧) · T_i
→ g2o / Ceres / GTSAM 都是这么做的
D. 五大具身智能应用场景
(以下表格摘自深蓝具身智能专栏)
| 场景 | 关键问题 | 李群表示 | 李代数优化 |
|---|---|---|---|
| SLAM 后端优化 | 相邻关键帧之间的相对位姿误差 | SE(3) 位姿节点 | se(3) 切空间扰动,GN/LM 求解 |
| 运动规划 | B样条/贝塞尔曲线在姿态空间的轨迹 | SO(3) 姿态轨迹 | so(3) 控制点采样,保证光滑无奇异 |
| 全身控制 (WBC) | 末端任务空间速度 → 关节速度 | SE(3) 任务坐标 | se(3) 速度通过雅可比映射 |
| 模型预测控制 (MPC) | 短时窗内最优轨迹 | SE(3) 系统状态 | se(3) 切空间线性化 → QP 标准形式 |
| 大模型动作微调 | VLA 网络输出"动作残差" | SE(3) 动作 | se(3) 增量梯度下降 |
E. 一句话总结
💡 第一性原理:具身智能的本质是"在物理世界中生成和控制刚体运动"——
- 运动必须在流形(李群)上合法 → 用 SO(3)/SE(3) 表示
- 优化必须在切空间(李代数)上线性 → 用 so(3)/se(3) 计算梯度
- 存储和传输用四元数最紧凑 → 工程系统的接口格式
这不是巧合,是数学结构决定的。
1.4.8 综合实战:SLAM 风格的位姿优化(教学示例)
下面用 Python 实现一个最小化版本的 SLAM 位姿误差优化——用 se(3) 切空间扰动 + 高斯牛顿迭代:
import numpy as np
# ===== 工具函数 =====
def skew(v):
return np.array([[0,-v[2],v[1]],[v[2],0,-v[0]],[-v[1],v[0],0]])
def exp_so3(omega):
theta = np.linalg.norm(omega)
if theta < 1e-8: return np.eye(3) + skew(omega)
K = skew(omega/theta)
return np.eye(3) + np.sin(theta)*K + (1-np.cos(theta))*(K@K)
def exp_se3(xi):
rho, omega = xi[:3], xi[3:]
R = exp_so3(omega)
theta = np.linalg.norm(omega)
if theta < 1e-8:
V = np.eye(3) + 0.5*skew(omega)
else:
K = skew(omega/theta)
V = np.eye(3) + ((1-np.cos(theta))/theta)*K + ((theta-np.sin(theta))/theta)*(K@K)
T = np.eye(4); T[:3,:3]=R; T[:3,3]=V@rho
return T
# ===== 问题设置:观测到一组 3D 点,估计相机位姿 =====
np.random.seed(42)
T_true = np.eye(4)
T_true[:3,:3] = exp_so3(np.array([0.1, 0.2, -0.3]))
T_true[:3, 3] = np.array([0.5, -0.3, 1.0])
# 3D 点(世界坐标系)
N = 30
P_world = np.random.uniform(-1, 1, size=(N, 3))
# 真实观测(相机坐标系)+ 噪声
P_cam_true = (T_true[:3,:3] @ P_world.T + T_true[:3,3:4]).T
P_cam_obs = P_cam_true + 0.01 * np.random.randn(N, 3)
# ===== 初始猜测 =====
T_est = np.eye(4)
# ===== 高斯牛顿迭代(在 se(3) 上线性化)=====
print(f"{'iter':>4} | {'cost':>12} | {'|delta|':>10}")
for it in range(20):
# 计算残差
P_cam_pred = (T_est[:3,:3] @ P_world.T + T_est[:3,3:4]).T
residual = (P_cam_pred - P_cam_obs).flatten() # 3N 维
# 计算雅可比(对 se(3) 扰动的偏导)
# 对单个点 p 的雅可比: J = [I, -[Rp]×] (3×6)
J = np.zeros((3*N, 6))
for i in range(N):
Rp = T_est[:3,:3] @ P_world[i]
J[3*i:3*i+3, :3] = np.eye(3)
J[3*i:3*i+3, 3:] = -skew(Rp)
# 解正规方程 (JᵀJ) Δξ = -Jᵀ r
H = J.T @ J
g = J.T @ residual
delta = -np.linalg.solve(H + 1e-6*np.eye(6), g)
# 在 se(3) 切空间上更新
T_est = exp_se3(delta) @ T_est
cost = 0.5 * residual @ residual
print(f"{it:>4} | {cost:>12.6e} | {np.linalg.norm(delta):>10.6e}")
if np.linalg.norm(delta) < 1e-8:
break
print("\n真实位姿 R:\n", T_true[:3,:3].round(4))
print("估计位姿 R:\n", T_est[:3,:3].round(4))
print("\n真实平移 t: ", T_true[:3,3].round(4))
print("估计平移 t: ", T_est[:3,3].round(4))
输出解读:cost 单调下降,delta 范数趋于 0,最终估计姿态收敛到真值附近——这就是 g2o/Ceres/GTSAM 等 SLAM 后端的核心思想。
1.4.9 常见误区与避坑指南
| 误区 | 正确做法 |
|---|---|
| 直接对欧拉角做梯度下降 | 转 so(3) 向量再优化 |
| 把四元数当 4 维向量做加法 | 用 SLERP 或对数→加法→指数 |
| 旋转矩阵相加再"投影"回 SO(3) | 直接在 so(3) 上做加法 |
| 忘记四元数的双覆盖性 | 比较前先对齐符号(q·q' > 0) |
| 网络直接输出旋转矩阵 9 维 | 输出 so(3) 或 6D 表示 [Zhou et al. 2019] |
| 用 scipy 时混淆 quat 顺序 | scipy 用 [x,y,z,w];Eigen/ROS 多用 [w,x,y,z] |
| 小角度时直接除以 sin(θ) | 用泰勒展开数值稳定版本 |
| SLAM 优化用 Euler 角参数化 | 必须用 se(3) 或 SE(3) on-manifold |
1.4.10 本节小结
┌─────────────────────────────────────────────────────────────────────┐
│ │
│ ┌─────────────┐ ┌─────────────┐ ┌─────────────┐ │
│ │ 欧拉角 │ ⚠️ │ 旋转矩阵 R │ ✅ │ 四元数 q │ │
│ │ (显示用) │ ────→ │ (推导用) │ ────→ │ (存储用) │ │
│ │ 万向锁 │ │ RᵀR=I │ │ |q|=1 │ │
│ └─────────────┘ └─────────────┘ └─────────────┘ │
│ │ │ │
│ log ↑│↓ exp log ↑│↓ exp │
│ ↓ ↓ │
│ ┌───────────────────────────────────┐ │
│ │ so(3) / se(3) 向量 │ │
│ │ (3 维 / 6 维,无约束) │ │
│ │ ✅ 可微 ✅ 线性 ✅ 优化友好 │ │
│ └───────────────────────────────────┘ │
│ │
│ 应用:SLAM 后端、运动规划、WBC、MPC、RL 动作微调、VLA 模型 ... │
│ │
└─────────────────────────────────────────────────────────────────────┘
关键公式速查表
SO(3) 定义: RᵀR = I, det(R) = +1
SE(3) 定义: T = [R t; 0 1], R ∈ SO(3)
反对称化: [ω]× v = ω × v
Rodrigues: R = I + sin(θ)/θ · [ω]× + (1-cos θ)/θ² · [ω]ײ
对数映射: θ = arccos((tr R - 1)/2)
ω = θ/(2 sin θ) · vee(R - Rᵀ)
四元数: q = (cos(θ/2), sin(θ/2)·k)
四元数乘法: q₁⊗q₂ = (w₁w₂ - v⃗₁·v⃗₂, w₁v⃗₂ + w₂v⃗₁ + v⃗₁×v⃗₂)
四元数旋转: v⃗' = q ⊗ (0,v⃗) ⊗ q*
SE(3) 指数: exp(ξ∧) = [exp([ω]×) V·ρ; 0 1]
V = I + (1-cos θ)/θ · K + (θ-sin θ)/θ · K²
( K = [ω/θ]× )
流形扰动: R ← R · exp(δω∧) (右乘扰动)
T ← T · exp(δξ∧) (右乘扰动)
T ← exp(δξ∧) · T (左乘扰动)
进阶资源(深入学习推荐)
| 类型 | 资源 |
|---|---|
| 入门博客 | 深蓝具身智能《具身智能基础》专栏 |
| 中文经典 | 《视觉 SLAM 十四讲》高翔 — 第 3、4 章 |
| 英文经典 | 《State Estimation for Robotics》Timothy Barfoot — 第 7 章 |
| 工程库 | Sophus(C++)、liegroups(Python) |
| 论文 | "A micro Lie theory for state estimation in robotics" — Solà et al. 2018 |
| 论文 | "On the Continuity of Rotation Representations in Neural Networks" — Zhou et al. CVPR 2019(神经网络该输出什么?) |
| 视频 | 3Blue1Brown《四元数视觉化》中英字幕版 |
模块2:机器人运动学数学(50分钟)
2.1 正运动学(Forward Kinematics)
问题:已知关节角度,求末端位置
FK:输入关节角 (θ₁, θ₂) → 计算末端 (x, y)。
两个关节角同时变化,末端在工作空间内画出连续轨迹(橙色尾巴)。
2.1.1 DH参数法
Denavit-Hartenberg参数:描述连杆关系的标准方法
| 参数 | 含义 |
|---|---|
| a | 连杆长度 |
| α | 连杆扭转角 |
| d | 连杆偏距 |
| θ | 关节角 |
def forward_kinematics_2dof(theta1, theta2, L1, L2):
"""
2自由度机械臂正运动学
theta1, theta2: 关节角度(弧度)
L1, L2: 连杆长度
"""
x = L1 * np.cos(theta1) + L2 * np.cos(theta1 + theta2)
y = L1 * np.sin(theta1) + L2 * np.sin(theta1 + theta2)
return x, y
# 示例
L1, L2 = 1.0, 1.0 # 两个连杆长度都是1
theta1 = np.pi / 4 # 45度
theta2 = np.pi / 4 # 45度
x, y = forward_kinematics_2dof(theta1, theta2, L1, L2)
print(f"末端位置: ({x:.2f}, {y:.2f})")
2.2 逆运动学(Inverse Kinematics)
问题:已知末端位置,求关节角度(更难!)
IK:给定末端目标圆形轨迹(橙色虚线),反求每一时刻的 (θ₁, θ₂)。
机械臂末端跟随目标,红色实线 = 实际轨迹,右侧实时显示余弦定理求解结果。
逆运动学:[x, y] → [θ1, θ2]
特点:
• 可能有多个解(手肘向上/向下)
• 可能无解(超出工作空间)
• 可能有无穷多解(冗余机械臂)
2.2.1 解析解法(简单机械臂)
def inverse_kinematics_2dof(x, y, L1, L2):
"""
2自由度机械臂逆运动学(解析解)
"""
# 余弦定理求θ2
D = (x**2 + y**2 - L1**2 - L2**2) / (2 * L1 * L2)
# 检查是否有解
if abs(D) > 1:
raise ValueError("目标点超出工作空间")
# 手肘向上的解
theta2 = np.arccos(D)
theta1 = np.arctan2(y, x) - np.arctan2(L2*np.sin(theta2), L1+L2*np.cos(theta2))
return theta1, theta2
# 测试:先正运动学,再逆运动学
theta1_target = np.pi / 3
theta2_target = np.pi / 6
x, y = forward_kinematics_2dof(theta1_target, theta2_target, L1, L2)
print(f"正运动学: θ1={theta1_target:.2f}, θ2={theta2_target:.2f} → ({x:.2f}, {y:.2f})")
theta1_solved, theta2_solved = inverse_kinematics_2dof(x, y, L1, L2)
print(f"逆运动学: ({x:.2f}, {y:.2f}) → θ1={theta1_solved:.2f}, θ2={theta2_solved:.2f}")
print(f"误差: Δθ1={abs(theta1_target-theta1_solved):.4f}, Δθ2={abs(theta2_target-theta2_solved):.4f}")
2.2.2 数值解法(复杂机械臂)
from scipy.optimize import fsolve
def ik_numerical(target_pos, L1, L2, initial_guess=[0, 0]):
"""
数值法求解逆运动学
"""
def equations(theta):
x, y = forward_kinematics_2dof(theta[0], theta[1], L1, L2)
return [x - target_pos[0], y - target_pos[1]]
solution = fsolve(equations, initial_guess)
return solution
# 测试
target = [1.0, 1.0]
theta_solution = ik_numerical(target, L1, L2)
print(f"数值解: θ1={theta_solution[0]:.2f}, θ2={theta_solution[1]:.2f}")
# 验证
x_check, y_check = forward_kinematics_2dof(theta_solution[0], theta_solution[1], L1, L2)
print(f"验证: 目标({target[0]:.2f}, {target[1]:.2f}), 实际({x_check:.2f}, {y_check:.2f})")
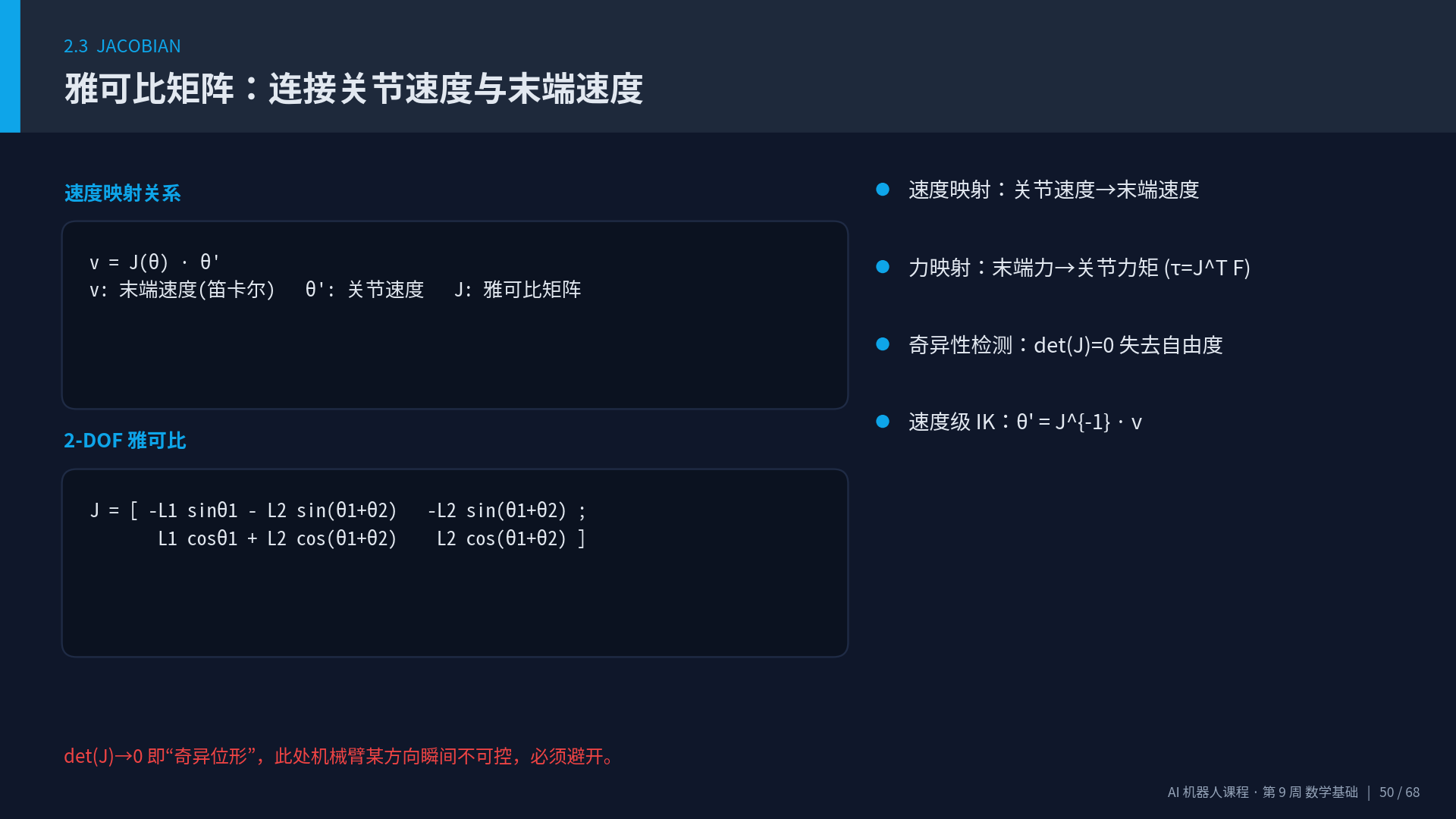
2.3 雅可比矩阵(Jacobian Matrix)
描述关节速度与末端速度的关系
雅可比矩阵 v = J(θ)·θ̇ 实时演示:左图红色箭头 = 末端速度向量,
右图实时显示 J 的所有元素与 det(J)。det(J) → 0 时进入奇异位形(状态变红)。
雅可比矩阵:
v = J(θ) * θ̇
v: 末端速度(笛卡尔空间)
θ̇: 关节速度(关节空间)
J: 雅可比矩阵
def jacobian_2dof(theta1, theta2, L1, L2):
"""
2自由度机械臂雅可比矩阵
"""
J = np.array([
[-L1*np.sin(theta1) - L2*np.sin(theta1+theta2), -L2*np.sin(theta1+theta2)],
[ L1*np.cos(theta1) + L2*np.cos(theta1+theta2), L2*np.cos(theta1+theta2)]
])
return J
# 示例:给定关节速度,求末端速度
theta1, theta2 = np.pi/4, np.pi/4
joint_velocity = np.array([0.1, 0.1]) # 关节速度 (rad/s)
J = jacobian_2dof(theta1, theta2, L1, L2)
end_velocity = J @ joint_velocity
print(f"雅可比矩阵:\n{J}")
print(f"关节速度: {joint_velocity}")
print(f"末端速度: {end_velocity}")
雅可比矩阵的应用:
- 速度映射:关节速度 → 末端速度
- 力映射:末端力 → 关节力矩
- 奇异性检测:det(J)=0 时机械臂失去自由度
- 速度级逆运动学:v_target = J(θ) Δθ → Δθ = J^(-1) v_target
模块3:计算机视觉数学(50分钟)
3.1 图像的数学表示
3.1.1 数字图像
图像 = 矩阵
灰度图像(单通道):
I(x, y) ∈ [0, 255]
x →
y ┌──────────┐
↓ │ 255 200 │ 明亮
│ 100 50 │ 较暗
└──────────┘
彩色图像(三通道):
R(x, y), G(x, y), B(x, y)
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 创建一个简单的灰度图像
img = np.array([
[255, 200, 150],
[200, 150, 100],
[150, 100, 50]
], dtype=np.uint8)
print(f"图像形状: {img.shape}")
print(f"图像矩阵:\n{img}")
print(f"像素(0,0)的值: {img[0, 0]}")
# 显示图像
plt.imshow(img, cmap='gray')
plt.colorbar()
plt.title('数字图像矩阵')
plt.show()
3.2 卷积运算(Convolution)
卷积是计算机视觉和深度学习的核心运算
3.2.1 什么是卷积?
2D 卷积完整过程:左图红框 = 当前窗口,中间是卷积核(边缘检测算子),
右图每一格就是「窗口 × 核」逐元素相乘后求和的结果——这就是 CNN 第一层在做的事。
卷积 = 滑动窗口 × 加权求和
原图像 I: 卷积核 K:
┌────────┐ ┌────┐
│1 2 3 4 │ │1 0│
│5 6 7 8 │ * │0 -1│
│9 0 1 2 │ └────┘
└────────┘
过程:
1. 将卷积核放在图像左上角
2. 对应元素相乘并求和
3. 移动卷积核到下一位置
4. 重复直到遍历整个图像
def convolve2d_manual(image, kernel):
"""
手动实现2D卷积(教学用)
"""
img_h, img_w = image.shape
ker_h, ker_w = kernel.shape
# 输出图像大小
out_h = img_h - ker_h + 1
out_w = img_w - ker_w + 1
output = np.zeros((out_h, out_w))
# 滑动窗口
for i in range(out_h):
for j in range(out_w):
# 提取窗口
window = image[i:i+ker_h, j:j+ker_w]
# 卷积运算
output[i, j] = np.sum(window * kernel)
return output
# 示例图像
image = np.array([
[1, 2, 3, 4],
[5, 6, 7, 8],
[9, 10, 11, 12]
], dtype=float)
# 边缘检测卷积核
kernel = np.array([
[ 1, 0],
[ 0, -1]
])
result = convolve2d_manual(image, kernel)
print("原图像:")
print(image)
print("\n卷积核:")
print(kernel)
print("\n卷积结果:")
print(result)
3.2.2 常见卷积核及其作用
# 1. 边缘检测(Sobel算子)
sobel_x = np.array([
[-1, 0, 1],
[-2, 0, 2],
[-1, 0, 1]
])
sobel_y = np.array([
[-1, -2, -1],
[ 0, 0, 0],
[ 1, 2, 1]
])
# 2. 模糊(均值滤波)
blur_kernel = np.ones((3, 3)) / 9
# 3. 锐化
sharpen = np.array([
[ 0, -1, 0],
[-1, 5, -1],
[ 0, -1, 0]
])
# 使用OpenCV应用卷积
img = cv2.imread('test.jpg', cv2.IMREAD_GRAYSCALE)
edges_x = cv2.filter2D(img, -1, sobel_x)
edges_y = cv2.filter2D(img, -1, sobel_y)
blurred = cv2.filter2D(img, -1, blur_kernel)
sharpened = cv2.filter2D(img, -1, sharpen)
# 可视化
fig, axes = plt.subplots(2, 3, figsize=(12, 8))
axes[0, 0].imshow(img, cmap='gray')
axes[0, 0].set_title('原图')
axes[0, 1].imshow(edges_x, cmap='gray')
axes[0, 1].set_title('X方向边缘')
axes[0, 2].imshow(edges_y, cmap='gray')
axes[0, 2].set_title('Y方向边缘')
axes[1, 0].imshow(blurred, cmap='gray')
axes[1, 0].set_title('模糊')
axes[1, 1].imshow(sharpened, cmap='gray')
axes[1, 1].set_title('锐化')
plt.tight_layout()
plt.show()
3.3 特征提取数学
3.3.1 梯度与边缘
图像梯度:
∇I = [∂I/∂x]
[∂I/∂y]
梯度幅值:|∇I| = √((∂I/∂x)² + (∂I/∂y)²)
梯度方向:θ = arctan(∂I/∂y / ∂I/∂x)
Sobel 边缘检测的四个阶段:原图 → ∂I/∂x(垂直边缘)→ ∂I/∂y(水平边缘)→ |∇I|(梯度幅值)。
方块、圆、三角形的边缘被自动提取——这就是经典视觉、SLAM 特征点的起点。
def compute_gradient(image):
"""计算图像梯度"""
# 使用Sobel算子
grad_x = cv2.Sobel(image, cv2.CV_64F, 1, 0, ksize=3)
grad_y = cv2.Sobel(image, cv2.CV_64F, 0, 1, ksize=3)
# 梯度幅值
magnitude = np.sqrt(grad_x**2 + grad_y**2)
# 梯度方向
direction = np.arctan2(grad_y, grad_x)
return magnitude, direction, grad_x, grad_y
# 测试
img = cv2.imread('test.jpg', cv2.IMREAD_GRAYSCALE)
mag, dire, gx, gy = compute_gradient(img)
fig, axes = plt.subplots(2, 2, figsize=(10, 10))
axes[0, 0].imshow(gx, cmap='gray')
axes[0, 0].set_title('X梯度')
axes[0, 1].imshow(gy, cmap='gray')
axes[0, 1].set_title('Y梯度')
axes[1, 0].imshow(mag, cmap='gray')
axes[1, 0].set_title('梯度幅值(边缘强度)')
axes[1, 1].imshow(dire, cmap='hsv')
axes[1, 1].set_title('梯度方向')
plt.tight_layout()
plt.show()
3.3.2 Harris角点检测
角点 = 两个方向梯度都很大的点
Harris矩阵:
M = [Σ(Ix²) Σ(IxIy)]
[Σ(IxIy) Σ(Iy²) ]
角点响应:
R = det(M) - k * trace(M)²
R > threshold → 角点
def harris_corner_detection(image, k=0.04, threshold=0.01):
"""Harris角点检测"""
# 计算梯度
Ix = cv2.Sobel(image, cv2.CV_64F, 1, 0, ksize=3)
Iy = cv2.Sobel(image, cv2.CV_64F, 0, 1, ksize=3)
# Harris矩阵的元素
Ixx = Ix * Ix
Iyy = Iy * Iy
Ixy = Ix * Iy
# 高斯窗口平滑
Ixx = cv2.GaussianBlur(Ixx, (5, 5), 1)
Iyy = cv2.GaussianBlur(Iyy, (5, 5), 1)
Ixy = cv2.GaussianBlur(Ixy, (5, 5), 1)
# 计算角点响应
det = Ixx * Iyy - Ixy * Ixy
trace = Ixx + Iyy
R = det - k * trace * trace
# 阈值化
corners = R > threshold * R.max()
return R, corners
# 测试
img = cv2.imread('test.jpg', cv2.IMREAD_GRAYSCALE)
R, corners = harris_corner_detection(img)
# 可视化
img_color = cv2.cvtColor(img, cv2.COLOR_GRAY2BGR)
img_color[corners] = [0, 0, 255] # 红色标记角点
plt.figure(figsize=(12, 6))
plt.subplot(1, 2, 1)
plt.imshow(img, cmap='gray')
plt.title('原图')
plt.subplot(1, 2, 2)
plt.imshow(cv2.cvtColor(img_color, cv2.COLOR_BGR2RGB))
plt.title('角点检测结果')
plt.show()
3.4 相机成像模型
3.4.1 针孔相机模型
三维世界点 → 二维图像点
世界坐标系 (Xw, Yw, Zw)
↓
相机坐标系 (Xc, Yc, Zc)
↓
图像平面 (u, v)
投影方程:
u = fx * (Xc/Zc) + cx
v = fy * (Yc/Zc) + cy
其中:
(fx, fy): 焦距
(cx, cy): 主点
def project_3d_to_2d(point_3d, camera_matrix):
"""
3D点投影到2D图像
point_3d: [X, Y, Z]
camera_matrix: 3x3相机内参矩阵
"""
X, Y, Z = point_3d
fx, fy = camera_matrix[0, 0], camera_matrix[1, 1]
cx, cy = camera_matrix[0, 2], camera_matrix[1, 2]
# 投影
u = fx * (X / Z) + cx
v = fy * (Y / Z) + cy
return np.array([u, v])
# 相机内参矩阵
K = np.array([
[800, 0, 320], # fx, 0, cx
[ 0, 800, 240], # 0, fy, cy
[ 0, 0, 1]
])
# 三维点
point_3d = np.array([1.0, 0.5, 2.0]) # 距离相机2米
# 投影
point_2d = project_3d_to_2d(point_3d, K)
print(f"3D点: {point_3d}")
print(f"投影到图像: ({point_2d[0]:.1f}, {point_2d[1]:.1f})")
模块4:路径规划算法(40分钟)
💡 路径规划是机器人导航的核心:从 A 点到 B 点,怎么走?
4.1 路径规划问题概述
机器人路径规划三要素:
┌────────────────────────────────────────────────────────────┐
│ │
│ 起点 (Start) → 目标 (Goal) │
│ │
│ 约束条件: │
│ • 避开障碍物 │
│ • 满足运动学(机器人物理限制) │
│ • 路径尽可能短/平滑/安全 │
│ │
└────────────────────────────────────────────────────────────┘
两大类规划方法:
| 类别 | 代表算法 | 适用场景 | 特点 |
|---|---|---|---|
| 图搜索 | BFS / Dijkstra / A* | 栅格地图 | 离散、最优 |
| 采样型 | RRT / PRM | 高维空间 | 连续、概率完备 |
| 局部规划 | DWA / TEB | 实时避障 | 速度空间搜索 |
4.2 BFS(广度优先搜索)
最基础的图搜索算法,所有路径规划的起点
核心思想:从起点出发,像水波纹一样向外扩散,先到达的就是最短路径(按步数)。
BFS 扩展过程:
地图(S=起点,G=目标,■=障碍):
0 1 2 3 4
0 S · · · ·
1 · ■ ■ · ·
2 · ■ G ■ ·
3 · · · · ·
BFS 扩展层次:
层 1:扩展起点的邻居
┌─┬─┬─┬─┬─┐
│S│1│ │ │ │
│1│■│■│ │ │
└─┴─┴─┴─┴─┘
层 2:扩展第 1 层的邻居
┌─┬─┬─┬─┬─┐
│S│1│2│ │ │
│1│■│■│ │ │
│2│■│G│■│ │
└─┴─┴─┴─┴─┘
…直到找到 G
算法步骤:
1. 把起点放入队列
2. 重复直到队列为空:
a. 从队头取出一个节点
b. 如果是目标 → 返回路径
c. 否则把所有未访问的邻居加入队尾
3. 没找到 → 失败
优缺点:
- ✅ 简单、保证找到最短路径(按步数)
- ❌ 每条边权重当作 1,无法处理"地形成本"
- ❌ 大地图慢,搜索空间大
4.3 Dijkstra 算法
BFS 的升级版:考虑边的权重(cost)
核心思想:每次扩展当前累计代价最小的节点(而不是按层数)。
Dijkstra 数据结构:
优先队列(按累计代价排序)
┌───────────┐
│ 节点 | 代价 │ ← 每次取代价最小的
├───────────┤
│ A | 0 │
│ B | 3 │
│ C | 5 │
└───────────┘
算法步骤:
1. 起点代价 = 0,其他节点 = ∞
2. 把起点放入优先队列
3. 重复:
a. 取出代价最小的节点 u
b. 对每个邻居 v:
新代价 = u 的代价 + 边 (u, v) 的权重
如果新代价 < v 的当前代价:
更新 v 的代价
把 v 放入优先队列
4. 直到目标被取出
举例:草地走 1,沙地走 3,水走 5
┌─┬─┬─┬─┐
│S│1│1│1│ ← 草地路径成本 1+1+1+1+1 = 5
│1│1│3│3│ ← 沙地拐弯成本 1+1+3+3+5 = 13
│1│1│G│5│
└─┴─┴─┴─┘
Dijkstra 会选择上方草地路径 ✅
优缺点:
- ✅ 找到最短代价路径
- ✅ 适合带权重地图(地形成本)
- ❌ 没有方向感,向所有方向均匀扩展,慢
4.4 A* 算法(最常用)
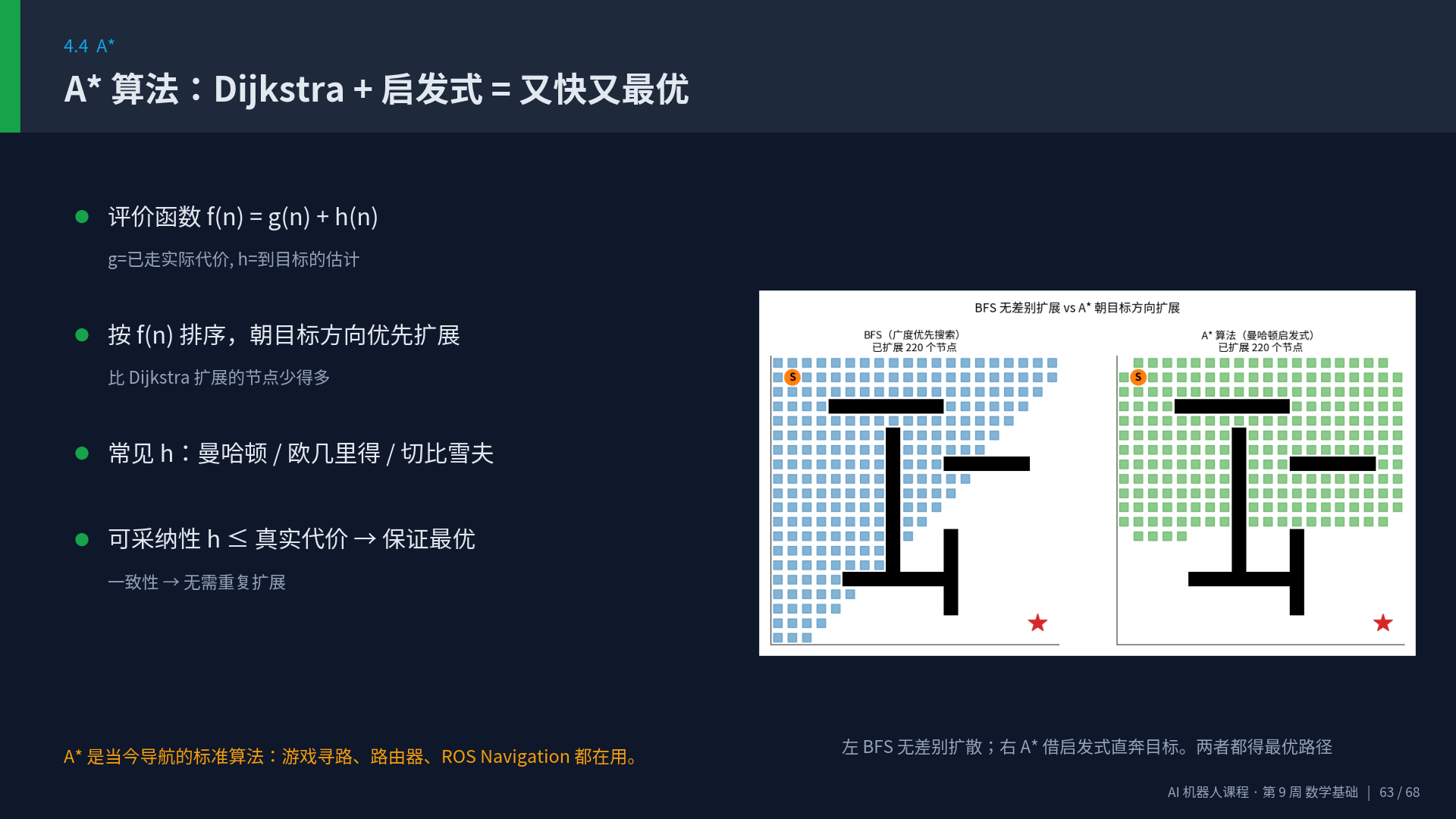
💎 Dijkstra + 启发式(Heuristic) = 又快又最优
BFS vs A* 同一张地图扩展过程对比:
左边 BFS 像水波一样无差别向外扩展(蓝色方块),最终扩展节点数很多;
右边 A* 借助曼哈顿启发式直奔目标,扩展节点数显著更少。两者都能找到最优路径(红色实线)。
核心思想:在 Dijkstra 的基础上,估计当前节点到目标的距离 h(n),朝着目标方向优先扩展。
A* 评价函数:
f(n) = g(n) + h(n)
g(n):从起点到 n 的实际代价(Dijkstra 部分)
h(n):从 n 到目标的启发式估计(指引方向)
f(n):总代价估计,优先队列按 f(n) 排序
常见 h(n):
• 曼哈顿距离 |Δx| + |Δy| (只能走横竖)
• 欧几里得距离 √(Δx² + Δy²) (可以斜着走)
• 切比雪夫距离 max(|Δx|, |Δy|) (8 邻居网格)
对比 Dijkstra vs A*:
Dijkstra:均匀向外扩展 A*:朝目标方向扩展
┌─┬─┬─┬─┬─┐ ┌─┬─┬─┬─┬─┐
│■│■│■│■│■│ │ │ │■│ │■│
│■│■│S│■│■│ │ │■│S│■│ │
│■│■│■│■│■│ → G │ │ │ │↘│ │ → G
│■│■│■│■│■│ │ │ │ │ │↘│
│■│■│■│■│■│ │ │ │ │ │ │
扩展了 ~50% 节点 只扩展了 ~20% 节点
启发式的要求:
| 性质 | 要求 | 影响 |
|---|---|---|
| 可采纳性 (Admissible) | h(n) ≤ 实际代价 | 保证最优 |
| 一致性 (Consistent) | h(n) ≤ cost(n,m) + h(m) | 不需要重复扩展 |
优缺点:
- ✅ 又快又最优(如果启发式可采纳)
- ✅ 当今导航的标准算法(路由器、游戏、ROS Nav 等)
- ❌ 启发式设计不好的话退化为 Dijkstra
- ❌ 内存占用较大(要存所有节点)
4.5 RRT(快速扩展随机树)
🌳 高维空间规划的利器(如机械臂 7 维关节空间)
RRT 生长过程:橙色 × = 随机采样点,绿色 ● = 新加入的树节点。
树从起点 S 出发,每一步朝随机方向延伸一小段,最终在障碍间生长出能到达目标 ★ 的路径(红线)。
为什么需要 RRT?
A* / Dijkstra 在高维空间问题:
2D 地图:100×100 = 10,000 格子 → 还能搜
3D 地图:100×100×100 = 1,000,000 格 → 较慢
7D 关节空间:100⁷ = 10^14 个状态 → 完全爆炸 ❌
→ 不能枚举所有状态,必须用随机采样
核心思想:从起点开始长出一棵树,每次:
- 随机采样一个点
- 找到树中最近的节点
- 朝采样点方向延伸一小步
- 如果合法(没撞障碍)→ 加入树
RRT 扩展过程:
Step 1: 仅有起点 Step 2: 随机采样
S S ↑
●(随机点)
Step 3: 找最近节点 Step 4: 延伸一小步
S──→● S─→●
↑(沿方向)
↗
…重复直到接近目标
算法伪代码:
function RRT(start, goal, max_iter):
tree = {start}
for i in 1..max_iter:
q_rand = random_sample() # 随机采样
q_near = nearest(tree, q_rand) # 找最近
q_new = steer(q_near, q_rand) # 延伸一步
if collision_free(q_near, q_new):
tree.add(q_new)
if distance(q_new, goal) < threshold:
return path_from(start, q_new)
return None # 失败
RRT 变体:
| 算法 | 改进点 |
|---|---|
| RRT* | 找到的路径会持续优化(渐近最优) |
| Informed-RRT* | 限制采样范围在椭圆内(更快收敛) |
| BiRRT | 起点和目标同时长树,相向相遇 |
| Kinodynamic-RRT | 考虑动力学约束(车辆、机器人) |
优缺点:
- ✅ 高维空间也能跑
- ✅ 概率完备(迭代足够多次必能找到解)
- ❌ 不保证最优(RRT*可以)
- ❌ 路径不平滑,需要后处理
4.6 DWA(动态窗口法)— 局部规划
🎯 实时避障常用,ROS Nav 默认局部规划器之一
DWA 在速度空间采样并模拟未来轨迹:左图是世界坐标中的所有候选轨迹(颜色 = 评分),
右图是 (v, ω) 速度窗口里的采样点(颜色 = 评分)。红色星标 = 最高分轨迹,机器人就执行它。
全局规划 vs 局部规划:
全局规划:在已知地图上规划一条路径(A* / Dijkstra)
↓
局部规划:实时跟踪全局路径 + 避开突然出现的障碍(DWA)
核心思想:在机器人当前的速度空间中采样,模拟未来一段时间,选最好的速度组合。
DWA 速度采样:
v (线速度)
↑
│ ★最优速度
│ ↓
│ ▢▢▢▢▢▢ ← 动态窗口:在物理约束内的可行速度
│ ▢▢▢▢▢▢
──────┼──────→ ω (角速度)
│
评价函数:
score(v, ω) = α · heading(v, ω) # 朝目标的程度
+ β · dist(v, ω) # 离障碍的距离
+ γ · velocity(v, ω) # 速度大小(鼓励前进)
算法步骤:
1. 计算动态窗口(机器人物理约束 + 安全约束)
2. 在窗口内采样 N×M 个 (v, ω) 组合
3. 对每个 (v, ω):
a. 模拟未来 T 秒的轨迹
b. 计算评分
4. 选评分最高的 (v, ω) 执行
5. 重复(典型频率 10-20 Hz)
优缺点:
- ✅ 实时性强(毫秒级响应)
- ✅ 直接输出速度命令(差速 / 全向轮)
- ❌ 容易陷入局部最优(被障碍包围会卡住)
- ❌ 不能"思考"长期目标(需要配合全局规划)
4.7 算法对比与选型
| 算法 | 时间复杂度 | 空间 | 最优性 | 适用场景 |
|---|---|---|---|---|
| BFS | O(V+E) | 高 | 步数最短 | 教学、简单网格 |
| Dijkstra | O((V+E)logV) | 高 | 代价最优 | 静态带权地图 |
| A* | O((V+E)logV) | 高 | 代价最优 | 已知地图导航(最常用) |
| RRT | 概率收敛 | 中 | 不保证 | 机械臂、无人机 |
| RRT* | 概率收敛 | 中 | 渐近最优 | 高质量路径需求 |
| DWA | O(N²) | 低 | 局部最优 | 实时避障 |
实战选择指南:
你的场景 → 推荐算法
────────────────────────────────
✓ 室内移动机器人导航 → A* (全局)+ DWA / TEB(局部)
✓ 自动驾驶决策规划 → Hybrid A* / RRT*
✓ 机械臂运动规划 → RRT* / PRM
✓ 无人机三维路径 → Informed RRT*
✓ 游戏 AI 寻路 → A* / Jump Point Search
✓ 教学演示 → Dijkstra / A*
4.8 进一步学习
本周只讲了原理,Python 实现 + ROS2 集成会在后续课程中实战:
- Week 10-11:感知(让机器人知道哪里有障碍)
- Week 13:四足机器人控制(步态规划)
- 期末项目(选题 5):多传感器融合导航 = A* + DWA + 实战
📚 推荐阅读:
- 《Planning Algorithms》Steven LaValle(路径规划经典)
- PythonRobotics GitHub - 包含所有经典算法 Python 实现
- 深蓝学院《机器人运动规划》课程(强烈推荐)
本周作业
✅ 必做题
1. 线性代数练习
# TODO: 完成以下练习
# 1. 实现3D旋转矩阵(绕x/y/z轴)
# 2. 验证旋转矩阵性质:R * R^T = I
# 3. 组合两个旋转变换
2. 运动学练习
# TODO: 3自由度机械臂
# 1. 实现正运动学函数
# 2. 实现逆运动学函数
# 3. 绘制工作空间
3. 卷积练习
# TODO: 图像处理
# 1. 手动实现3x3卷积
# 2. 应用不同卷积核观察效果
# 3. 比较手动实现与OpenCV的结果
4. 路径规划思考题
不需要写代码,只需画图或文字说明
- 给定一个 10×10 的网格地图,起点 (0,0),目标 (9,9),中间有几个障碍
- 画出 BFS 的扩展过程(标出第 1、2、3 层的节点)
- 画出 A*(用曼哈顿距离)的扩展过程
- 对比两者扩展的节点数量
- 解释为什么 A 在不可采纳启发式(h 大于真实代价)下会*找不到最优解
- 思考:什么样的场景适合 RRT 而不是 A*?反过来呢?
- 李群思考题(参考深蓝具身智能专栏):
- 解释为什么欧拉角在 pitch=90° 时会出现万向锁
- 说明四元数、旋转矩阵、so(3) 向量各适合什么场景(存储/显示/优化)
- 用一句话描述"李群→李代数→李群"优化链路的意义
🌟 选做题(加分)
- 推导雅可比矩阵:手推3自由度机械臂的雅可比矩阵
- 相机标定:使用棋盘格标定相机内参
- 特征匹配:实现SIFT/ORB特征点匹配
- 实现 A*:用 Python + numpy 实现 A* 算法(参考 PythonRobotics 仓库)
- 四元数实践:用
scipy.spatial.transform.Rotation实现两个姿态之间的 SLERP 插值,并可视化
📚 参考资料
教材
- 《机器人学导论》 - John J. Craig
- 《计算机视觉:算法与应用》 - Richard Szeliski
- 《深度学习》 - Ian Goodfellow
在线资源
- 3Blue1Brown 线性代数系列 - 直观数学动画
- 彻底搞懂具身智能必备知识:李群、李代数、四元数 - 深蓝具身智能专栏
- 机器人学公开课 - Stanford CS223A
- OpenCV教程
Python库
# 科学计算
pip install numpy scipy matplotlib
# 计算机视觉
pip install opencv-python opencv-contrib-python
# 机器人工具
pip install roboticstoolbox-python
📊 知识点总结
第9周知识图谱:
┌──────────────────────────────────────────────────────────────────┐
│ 数学基础 + 路径规划 │
├──────────────────────────────────────────────────────────────────┤
│ │
│ 线性代数 运动学数学 视觉数学 路径规划 │
│ ├── 向量 ├── 正运动学 ├── 图像矩阵 ├── BFS │
│ ├── 矩阵 ├── 逆运动学 ├── 卷积运算 ├── Dijkstra │
│ ├── 旋转矩阵 ├── 雅可比矩阵 ├── 特征提取 ├── A* │
│ ├── 齐次变换 └── 奇异性分析 └── 相机模型 ├── RRT/RRT* │
│ ├── SO(3)/SE(3) └── DWA │
│ ├── so(3)/se(3) │
│ └── 四元数 │
│ │
│ 应用场景: │
│ • 机械臂轨迹规划 • 机器人导航 • 视觉感知 │
│ • 自主避障 • 路径搜索 • 多传感器融合 │
│ │
└──────────────────────────────────────────────────────────────────┘
🎬 本章动画索引
本周所有动画都由
scripts/gen_week9_animations.py一个脚本生成。 学生可以 clone 后修改参数(旋转轴、机械臂长度、卷积核、起点终点等)来"做自己的版本"。
| # | 章节 | 动画 | 解释什么 |
|---|---|---|---|
| 1 | §1.2.2 | vector_ops.gif |
向量加法(平行四边形法则)+ 点积(投影) |
| 2 | §1.3.1 | rotation_2d.gif |
2D 旋转矩阵 R(θ) 作用于物体 |
| 3 | §1.3.2 | homogeneous_transform.gif |
齐次变换 = 旋转 + 平移 |
| 4 | §1.4.1 | gimbal_lock.gif |
欧拉角万向锁的几何过程 |
| 5 | §1.4.4 | rodrigues_axis_angle.gif |
Rodrigues 公式 so(3)→SO(3) |
| 6 | §1.4.6 | quaternion_slerp.gif |
SLERP vs 欧拉角线性插值对比 |
| 7 | §2.1 | forward_kinematics.gif |
2-DOF 机械臂正运动学 |
| 8 | §2.2 | inverse_kinematics.gif |
2-DOF 机械臂逆运动学(跟随圆轨迹) |
| 9 | §2.3 | jacobian.gif |
雅可比矩阵 + 奇异位形 |
| 10 | §3.2.1 | convolution.gif |
2D 卷积滑动窗口 |
| 11 | §3.3.1 | edge_detection.gif |
Sobel 边缘检测四阶段 |
| 12 | §4.4 | bfs_vs_astar.gif |
BFS vs A* 扩展过程对比 |
| 13 | §4.5 | rrt_planning.gif |
RRT 随机采样建树 |
| 14 | §4.6 | dwa_planning.gif |
DWA 速度空间采样 + 评分 |
💡 🌟 选做题加分项:clone 仓库 → 修改
gen_week9_animations.py里某个动画的参数(例如把机械臂改成 3-DOF,或把 RRT 障碍物换一种布局)→ 生成你自己的 GIF → 在 PR 里附上。
下周预告
第10周:物体检测与识别(已完成) 第11周:目标追踪(已完成) 第12周:手机摄像头、ArUco 识别与距离测量
- 使用 Tailscale 将手机摄像头接入 WSL
- 完成 ArUco 识别与相机标定
- 利用标定数据计算 ArUco 距离
第9周网课结束!数学基础打好,后面实战更轻松!